Laser radar detection device and method for short-distance barriers
A detection device and obstacle detection technology, applied in the field of obstacle detection, can solve the problems of limited number of obstacles, limited FOV, and inability to apply close-range detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Embodiments of the present invention will be further explained with the help of related figures below. Wherever possible, the same reference numerals have been used in the drawings and description to refer to the same or similar components. In the drawings, the shape and thickness may be exaggerated for the sake of simplification and convenient labeling. It can be understood that components not particularly shown in the drawings or described in the specification are forms known to those skilled in the art. Those skilled in the art can make various changes and modifications according to the content of the present invention.
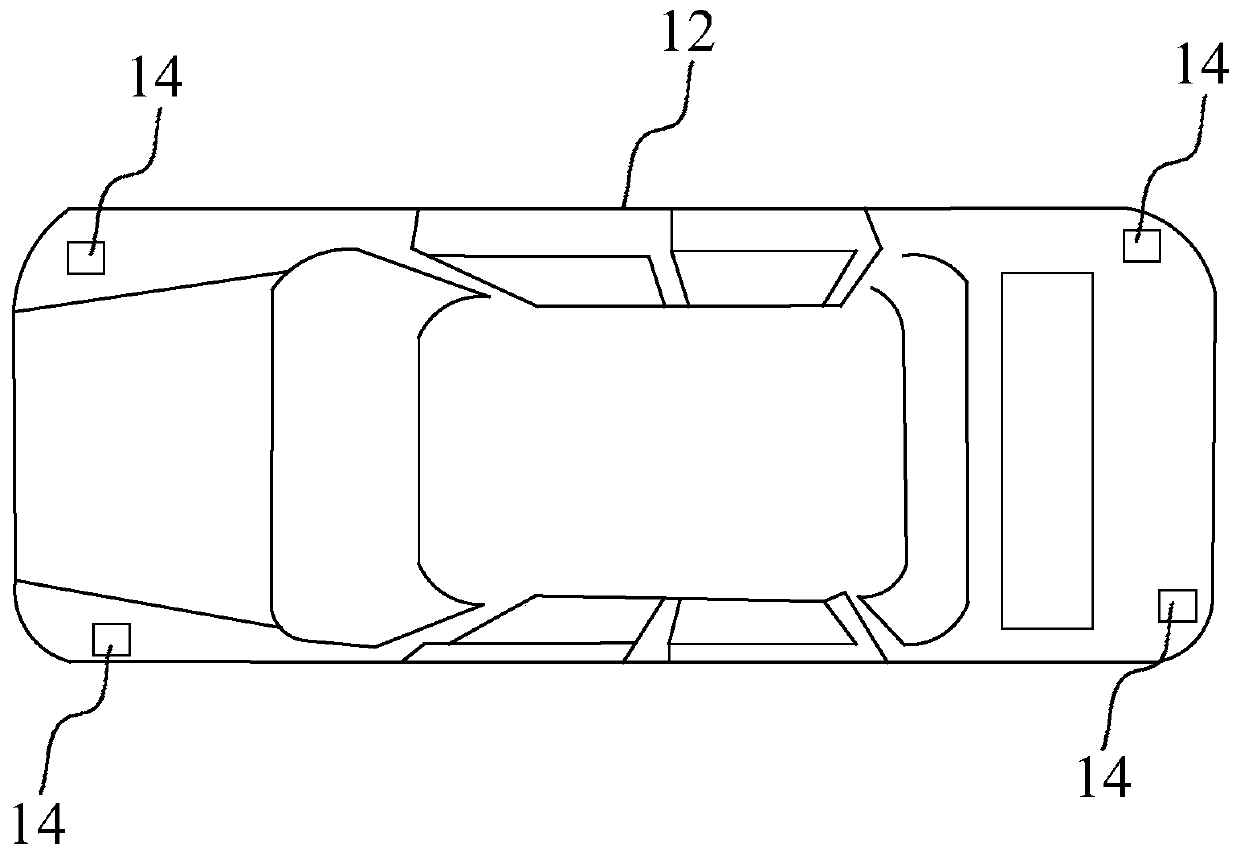
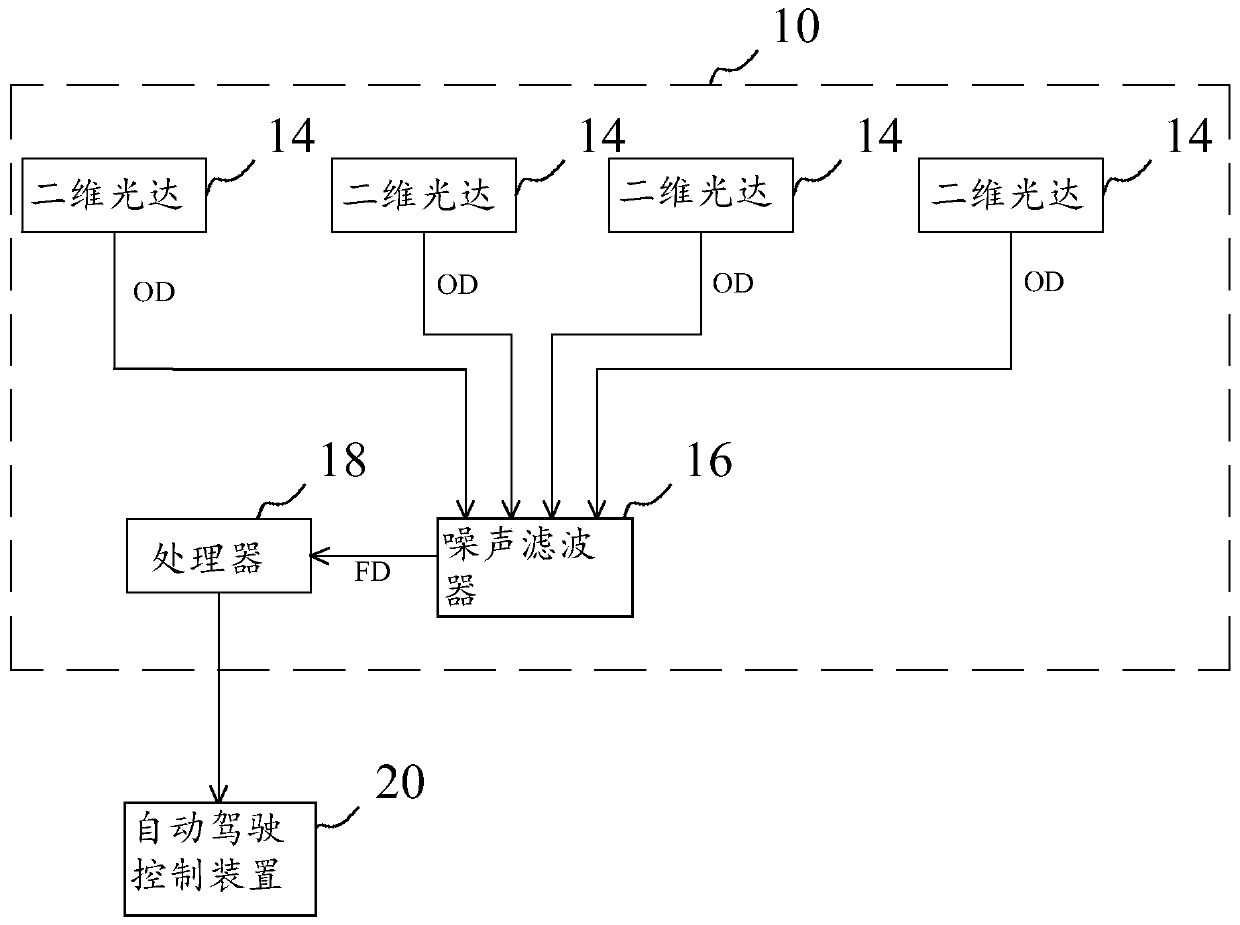
[0019] see below figure 1 , figure 2 and image 3 . The following describes the LiDAR detection device 10 for short-distance obstacles of the present invention, which is installed in a vehicle 12. There is at least one obstacle around the vehicle 12, and the number of obstacles is taken as an example. The distance between each obstacle and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com