Auxiliary system for taking off, landing and loading of multi-rotor UAV (unmanned aerial vehicle) on movable platform
A multi-rotor UAV and mobile platform technology, which is applied in the field of multi-rotor UAV autonomous take-off and landing system, can solve the problems of limited stability, poor control stability, poor wind resistance, etc., and achieve the effect of broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
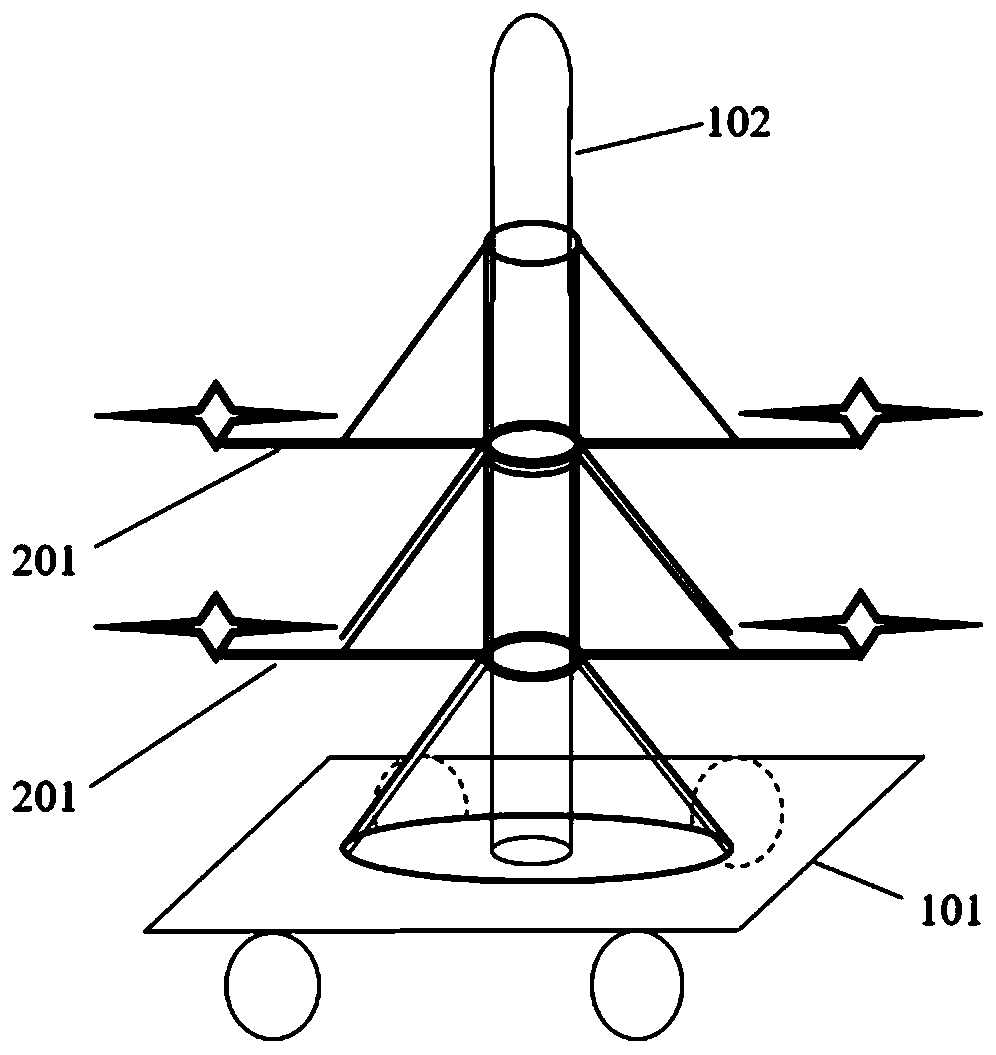
[0017] The technical solutions and beneficial effects of the present invention will be described in detail below in conjunction with the accompanying drawings.
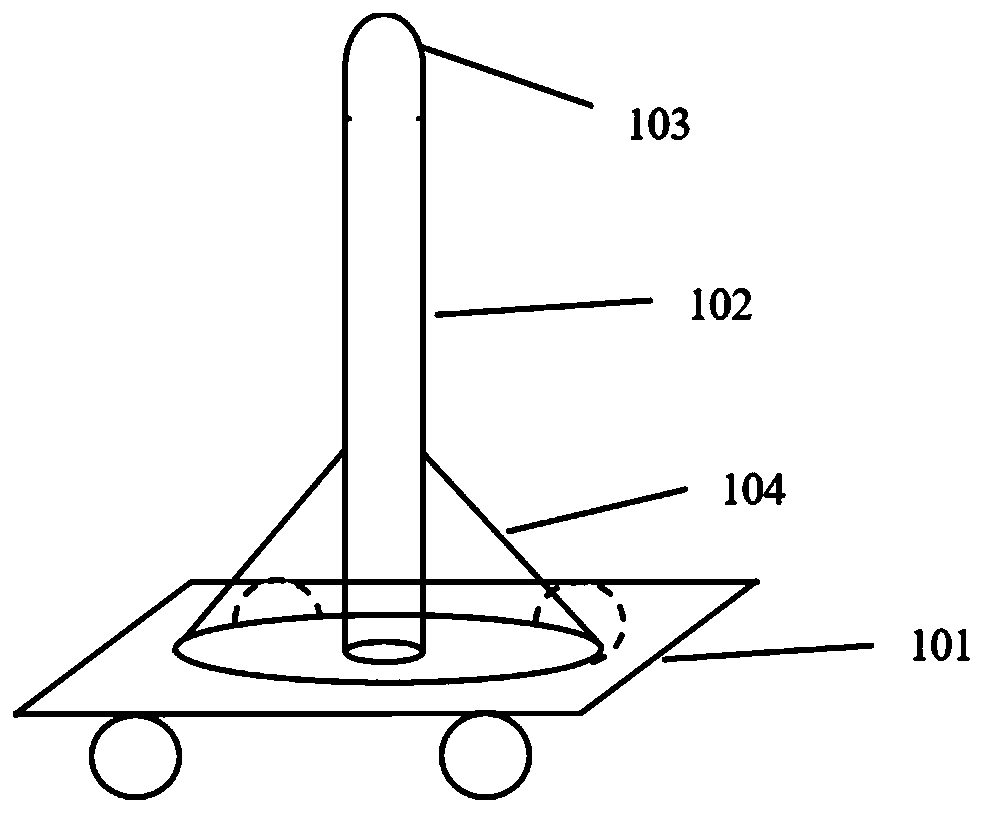
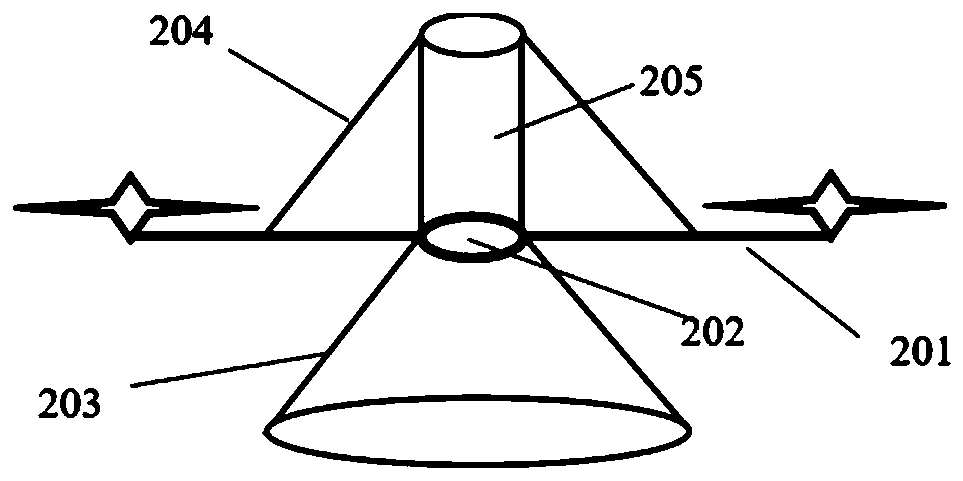
[0018] Such as image 3 As shown, the present invention provides an auxiliary system for taking off, landing and carrying of a multi-rotor UAV on a mobile platform, including a base 104 arranged on a mobile platform 101, a sleeve rod 102 and a multi-rotor UAV 201 Taper sleeve 203,204, sleeve 205 on the top are introduced respectively below.
[0019] Cooperate figure 1 As shown, the base 104 is conical and has an opening at the top, which is generally in the shape of a circular platform. The base 104 is fixed on the mobile platform 101, on the one hand, it enhances the stability of the sleeve rod 102, and on the other hand, it carries the bottom of the sleeve rod. The UAV at the end; the bottom end of the sleeve rod 102 penetrates through the top opening of the base 104 and is fixed on the mobile platform 101. The sl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com