Multi-rotor drone autonomous landing method based on monocular vision and fuzzy control
A multi-rotor unmanned aerial vehicle, fuzzy control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inability to achieve precise landing, achieve continuous speed, improve control accuracy, and pose detection high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0023] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so that the protection scope of the present invention can be defined more clearly.
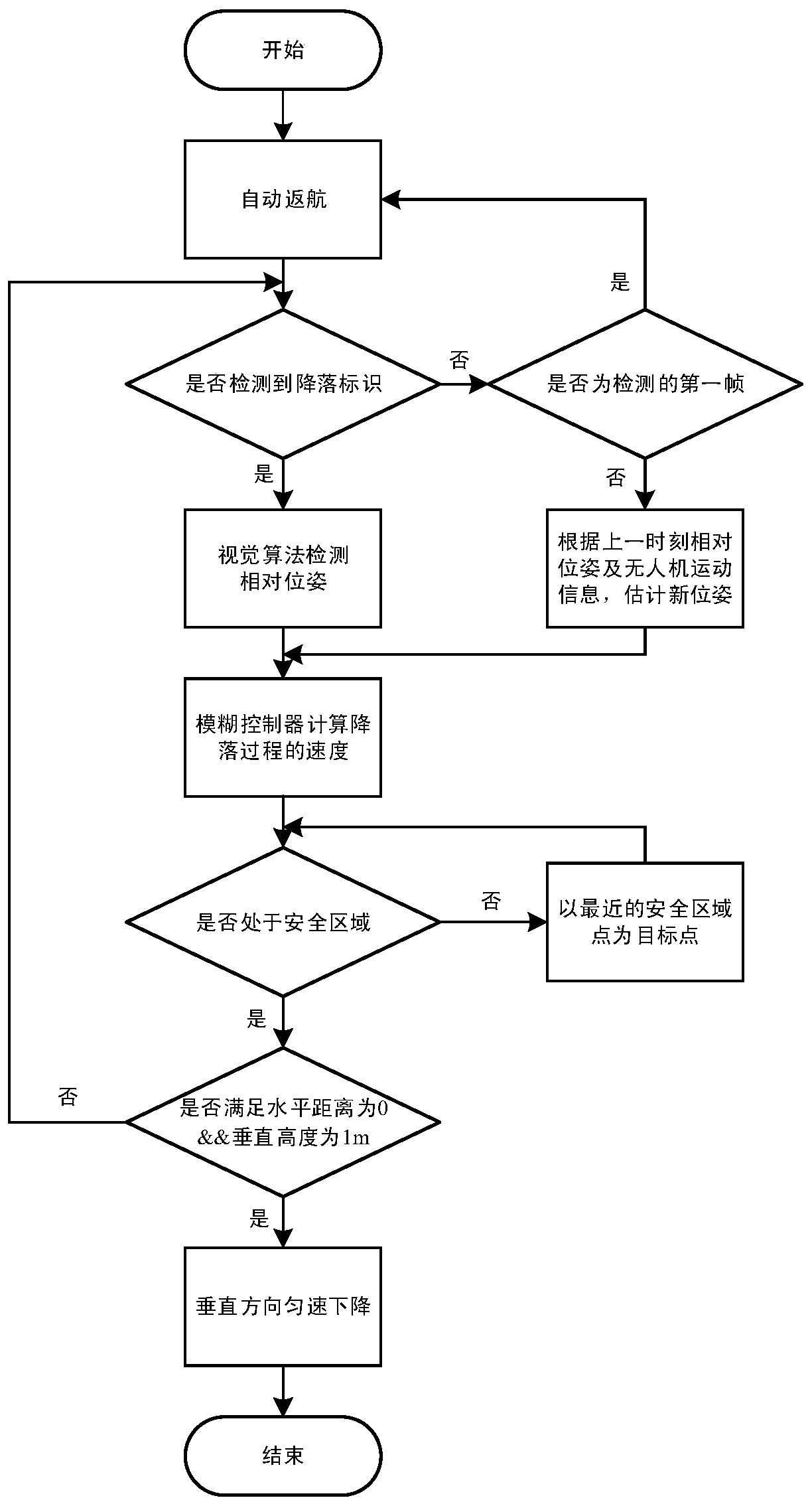
[0024] A method for autonomous landing of multi-rotor UAV based on monocular vision and fuzzy control, the process of the method is as follows figure 1 As shown, the specific steps are as follows:
[0025] Step 1. Use the GPS navigation system to guide the multi-rotor UAV to fly near the landing gear of the landing sign;
[0026] The landing gear of the landing sign is as Figure 5 As shown, mark the expected landing position of the drone, which is a square AprilTag QR code with a side length of 1m, a black grid outside, a 6×6 code inside, and the geometric center is the expected landing position of the drone;
[0027] Step 2: Use the downward-loo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com