Accurate path tracking control method of unmanned ship based on dual-guidance of speed and course
A path tracking, unmanned ship technology, applied in two-dimensional position/channel control and other directions, can solve problems such as reducing the accuracy of unmanned ship path tracking control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0116] The present invention will be further described below in conjunction with the accompanying drawings.
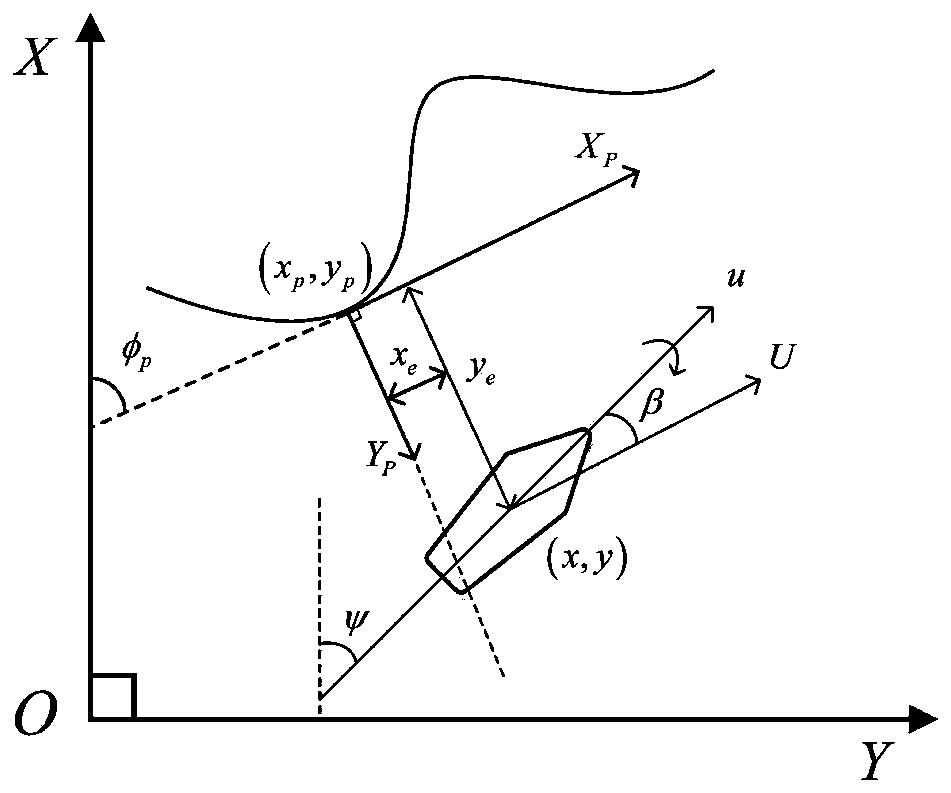
[0117] figure 1 Shown is the relationship between the inertial coordinate system and the subject's fixed coordinate system, and a schematic diagram of the positions of the moving virtual ship and the unmanned ship in step A.
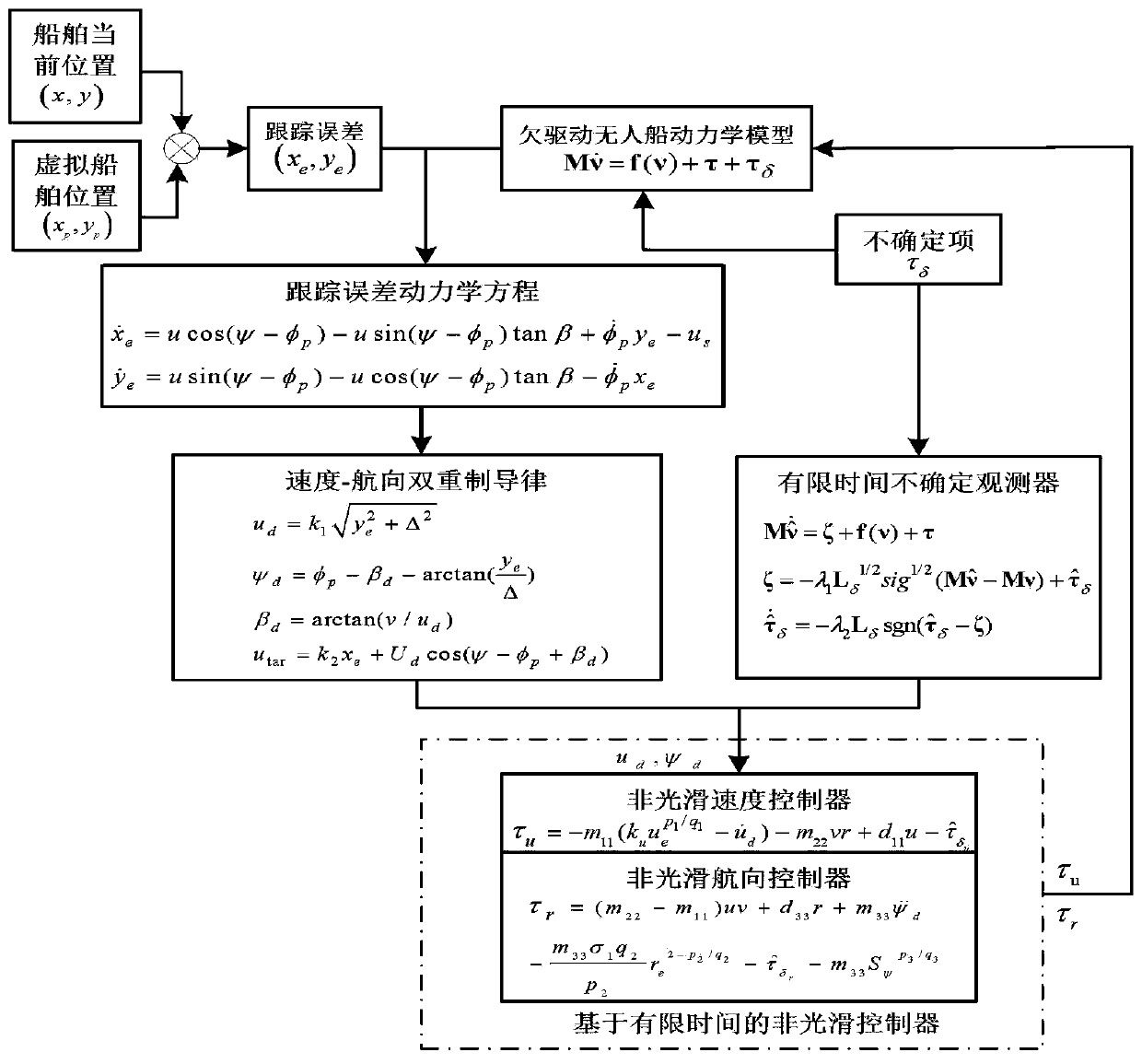
[0118] figure 2 It is a block diagram of the path tracking control system. The tracking error dynamics equation is obtained from the dynamic model of the underactuated unmanned ship and the actual position error between the virtual ship and the unmanned ship. Based on this equation, the dual guidance law of speed and heading is designed. According to the unknown uncertain items, a finite time observer is designed, and a corresponding non-smooth controller is designed to control the underactuated unmanned vehicle to achieve accurate path tracking requirements.
[0119] In order to check the effectiveness of the proposed method of the present in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com