A passive determination method of underwater glider platform motion trajectory
A technology of underwater glider and motion trajectory, which is applied in navigation, instrumentation, surveying and navigation, etc., can solve the problem of inability to calculate the passive trajectory of the carrier, and achieve the effect of simple implementation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0030] A method for passively determining the motion track of an underwater glider platform according to the present embodiment, the method includes the following steps:
[0031] Step 1. According to the GPS information of the water entry point and the water exit point position of the glider, calculate the average flow velocity and flow direction information of the platform movement area;
[0032] Step 2. Calculate the vertical movement speed V of the glider according to the depth gauge information carried by the glider Z ;
[0033] Step 3. Deduce the attitude transfer matrix R according to the compass loading characteristics;
[0034] Step 4. Obtain the attitude of the glider at each moment according to the compass carried by the glider, so as to calculate the attitude transfer matrix R at each moment i ;
[0035] Step five, according to the vertical movement speed V of the glider in step two Z and the attitude transition matrix R at each moment in step 4 i , find the in...
specific Embodiment approach 2
[0039] The difference from Embodiment 1 is that in the method for passively determining the motion trajectory of an underwater glider platform in this embodiment, in the first step, the motion of the glider is obtained according to the GPS information of the water entry point and the water exit point of the glider. The process of regional average ocean current velocity and flow direction information, specifically:
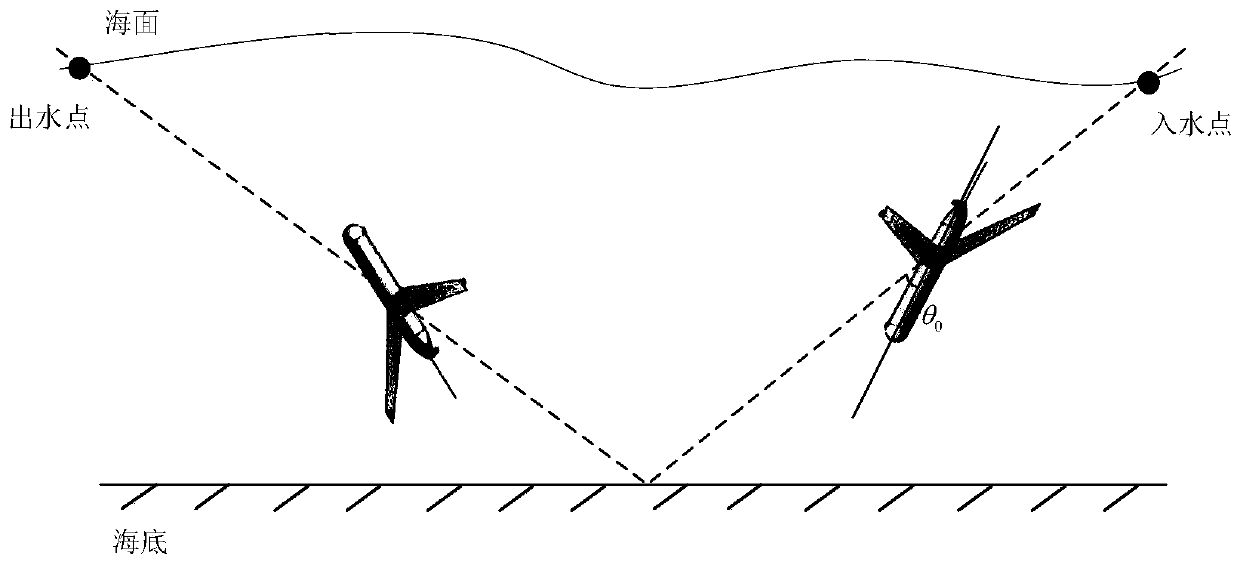
[0040] Step 11, set the glider to complete a section movement under the condition of relying on its own gravity, water buoyancy and ocean current, the schematic diagram is as follows figure 1 shown. Through the attitude information of the compass record carrier carried by the glider at each moment, the roll angle roll of the glider is represented by r(t), and the roll angle roll of the glider is represented by Indicates the pitch angle pitch, and the heading angle is represented by θ(t); the GPS coordinate of the water entry point is G r =(X r ,Y r ), the GPS ...
specific Embodiment approach 3
[0055] Different from the second specific embodiment, the method for passively determining the trajectory of the underwater glider platform according to the present embodiment, in the second step, the calculation formula for calculating the vertical motion speed of the glider according to the depth gauge information carried by the glider is: Denote the vertical motion velocity of the glider as V Z , the vertical motion speed V Z Equal to the rate of change of the depth of the carrier, i.e. differentiate the depth d(t):
[0056]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com