Automatic driving method and system of intelligent boat for water quality monitoring
A technology of water quality monitoring and driving method, applied in radio wave measurement system, water-based ship navigation equipment, motor vehicles and other directions, can solve the problems of untimely response of water quality monitoring system, low time and space resolution, difficult steering operation, etc. Achieve the effect of not easy to be affected by water body terrain, simple steering operation and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
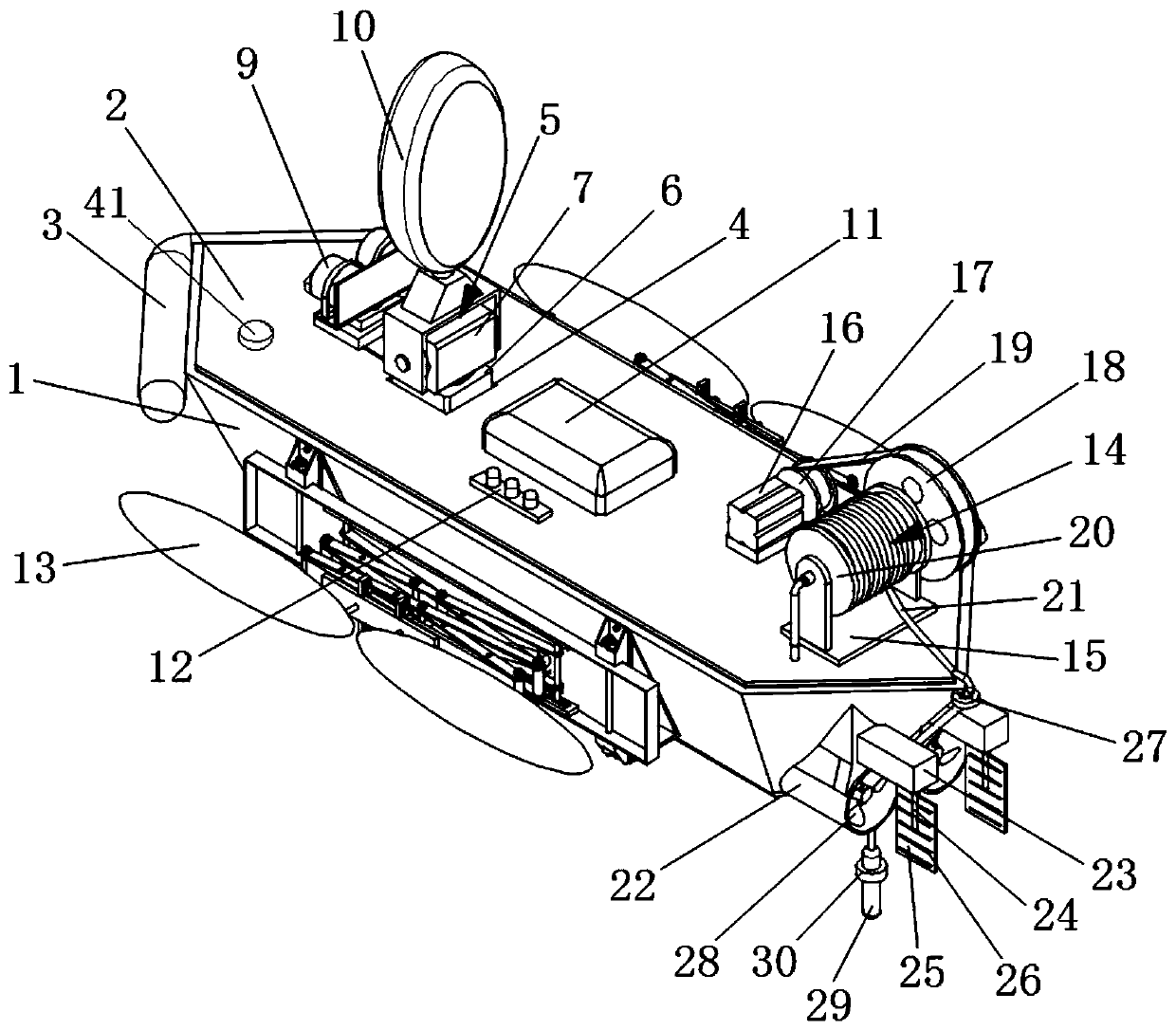
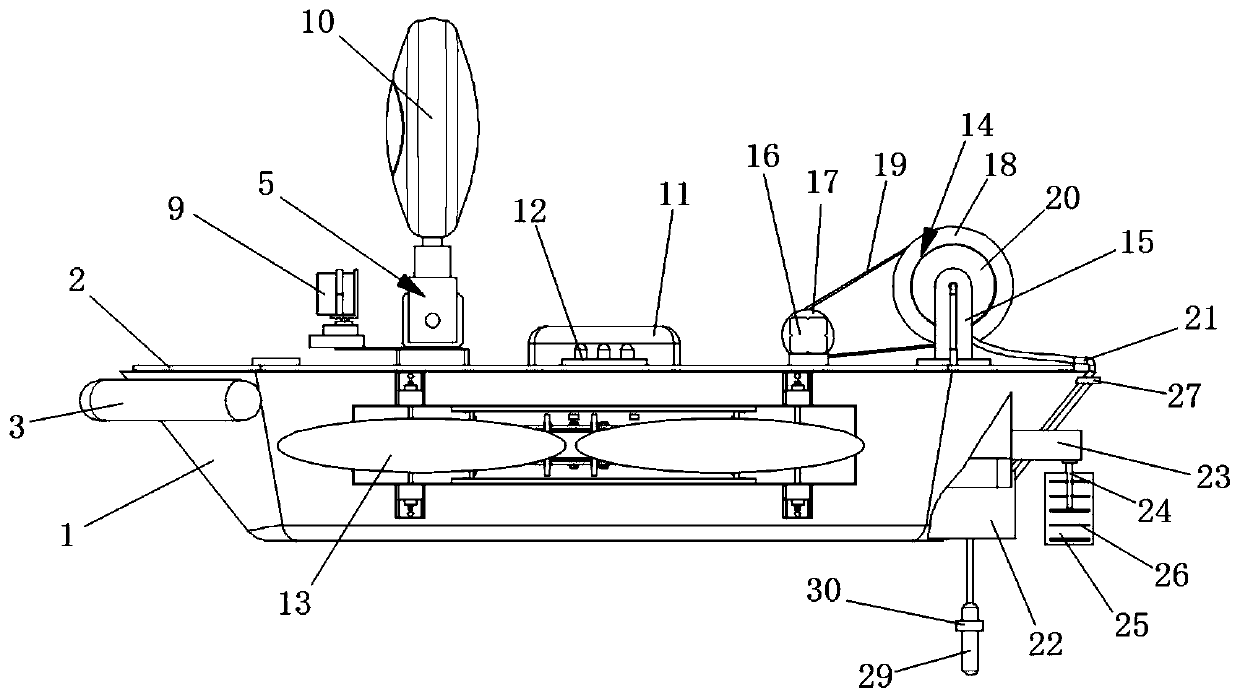
[0045] Embodiment: the driving method of water quality monitoring smart boat, as attached Figure 7 And attached Figure 8 As shown, it specifically includes the following steps:
[0046] (1) The radar on the boat detects the surrounding environment in real time and transmits it to the control computer. The information that the radar can detect is: the number of targets, the reflection area of the target, the target distance, the target azimuth, the target speed, and the signal-to-noise ratio.
[0047] (2) Considering that the radar may be inaccurate in actual application scenarios, such as misacquisition when the hull is bumping, the control computer screens the detection information received by the radar and determines that the detection information received by the radar is After the effective target signal, the control computer determines the area where the effective target detected by the radar exists under the pixel coordinates, that is, through the method of network c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com