Modeling method and system based on unmanned aerial vehicle
A modeling method, UAV technology, applied in the field of UAV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
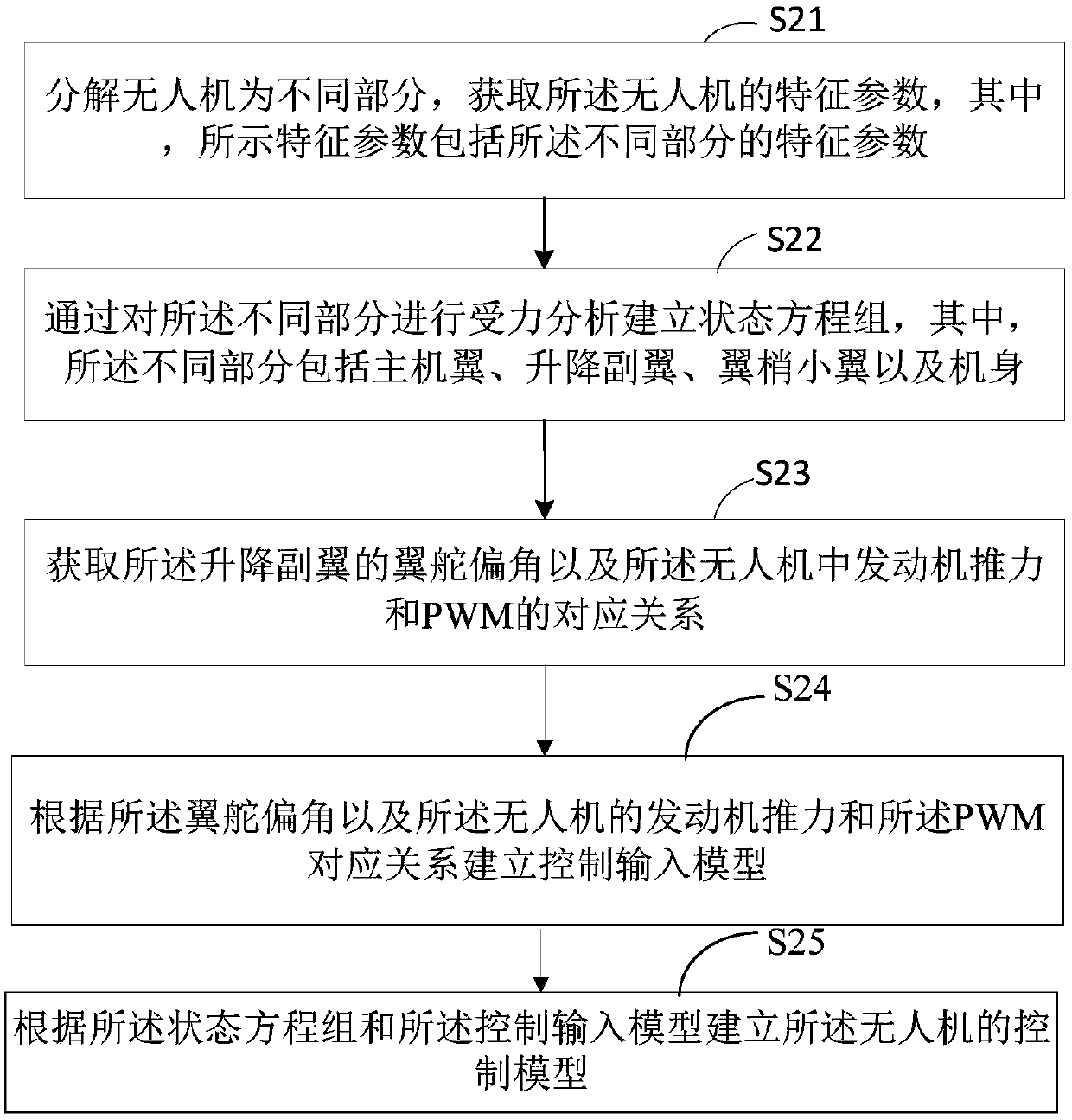
[0044] figure 2 It shows a schematic diagram of the implementation process of a UAV-based modeling method provided by an embodiment of the present application, including steps S21 to S25, wherein:
[0045] Step S21: Decompose the drone into different parts, and obtain characteristic parameters of the drone, where the characteristic parameters shown include the characteristic parameters of the different parts.
[0046] In the embodiment provided in this application, the structure of the flying-wing UAV is decomposed into the main wing, elevons, winglets, and fuselage, and then the relevant UAV structural characteristic parameters are obtained, such as including characterization UAV mass, area and length and other measurement information, such as UAV mass, wingspan, chord length, wing area, position of elevons relative to the center of gravity of the fuselage, etc.
[0047] Optionally, the characteristic parameters include structural characteristic parameters and performance character...
Embodiment 2
[0166] Figure 4 Shows a schematic structural diagram of a UAV-based modeling system provided by another embodiment of the present application, and the system includes:
[0167] The characteristic parameter acquisition module 41 is configured to decompose the drone into different parts and acquire characteristic parameters of the drone, where the characteristic parameters shown include characteristic parameters of the different parts;
[0168] The state equation group establishment module 42 is used to establish a state equation group by analyzing the forces on the different parts, where the different parts include the main wing, the elevons, the winglets, and the fuselage;
[0169] The control parameter acquisition module 43 is configured to acquire the wing rudder deflection angle of the elevons and the corresponding relationship between engine thrust and PWM in the UAV;
[0170] The model establishment module 44 is configured to establish a control input model according to the wing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com