Improved ant colony path planning algorithm based on non-uniform modeling
A path planning and non-uniform technology, applied in the direction of calculation, calculation model, biological model, etc., can solve the problem of not being able to escape the deadlock state
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0156] On a computer with Windows 10 operating system, Intel Core i5-5250U CPU, and a main frequency of 1.6GHz, the algorithm is verified on the platform of Matlab R2014b. The values of the parameters in the algorithm are as follows: τ=15, γ=2, α=2, β=1, q 0 =0.6, δ=0.2, ρ=1, Δτ o =0, σ=5, Q=200, μ 1 =0.3,μ 2 =0.3,μ 3 = 0.4, c p =100,Q o =100,τ max =0.4,τ min =0.0001, ρ=1, c=3, v=5m / s, D safe = 5km, r min = 0.01 km. The ant population contains 30 ants, and the maximum number of iterations is set to 60.
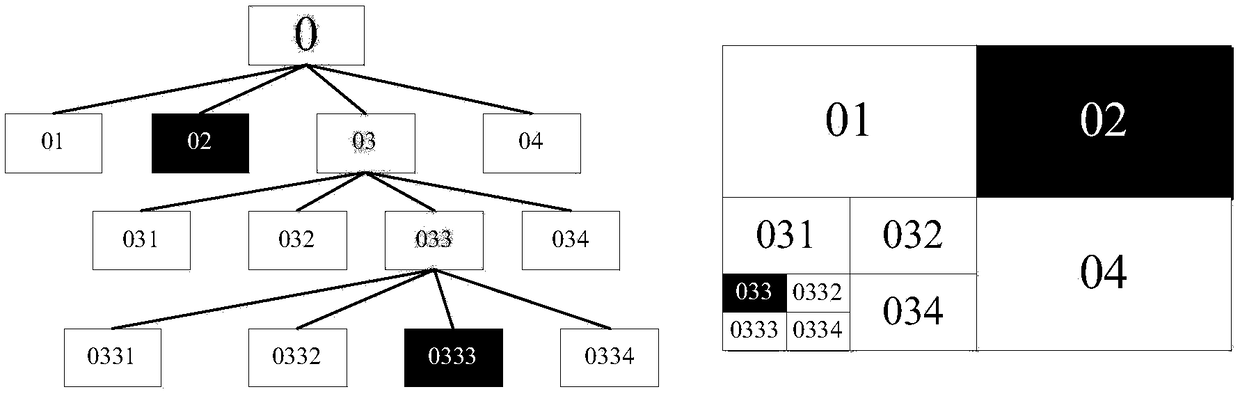
[0157] (1) Comparison of non-uniform grid model and uniform grid model
[0158] The present invention uses quadtree modeling to obtain a non-uniform grid model in order to verify the validity of the non-uniform grid model. The non-uniform modeling method and the uniform modeling method are used to model the same search space (sea area of 56.6km×52.7km), and the minimum grid scale is set to be the same (shortest length and width>=0.01km), and then the improved a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com