Pointer-type instrument identification method based on patrol inspection robot
A technology of an inspection robot and an identification method, which is applied in the field of electric inspection robots, can solve the problems of unstable indications, different shooting angles of inspection robots, and large deviations, and achieves the effect of improving the accuracy of identification.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0011] The solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
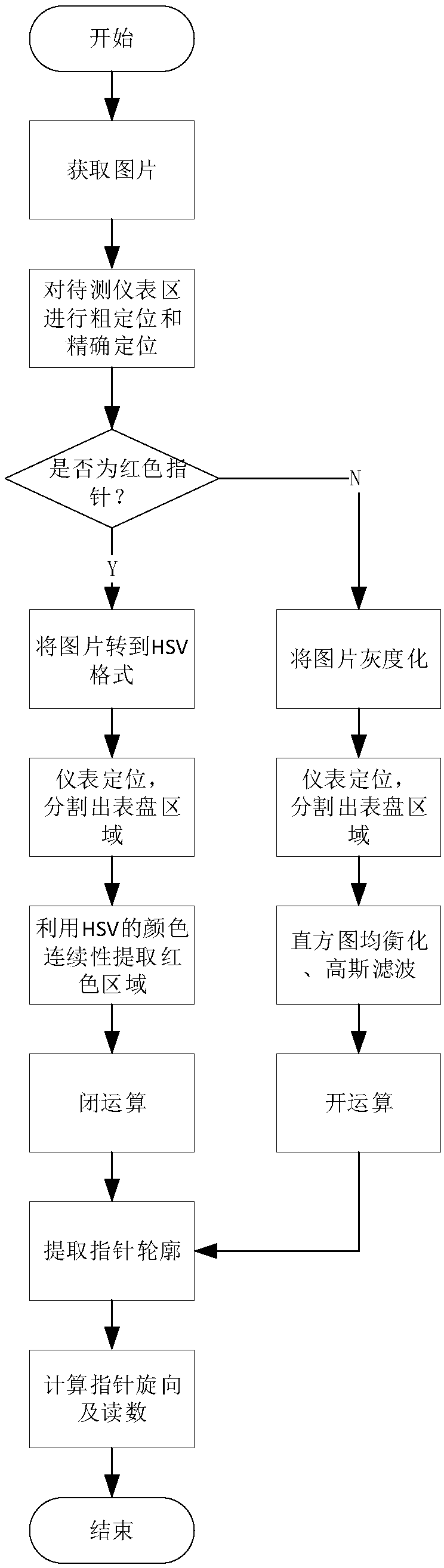
[0012] Such as figure 1 As shown, the pointer instrument recognition method based on the inspection robot includes the following steps:
[0013] Step 1. Classifier training: Use the instrument image dataset to train the Adaboost classifier, and select an image centered on the instrument as a template image for each inspection point. Since the instrument image dataset contains instrument images under different lighting and attitude conditions, the instrument can be accurately extracted no matter how the instrument detection environment changes.
[0014] Step 2. Instrument area positioning: Obtain the image of the instrument to be inspected at the specified inspection point, combine the Adaboost classifier and the template image for rough positioning and precise positioning, and filter out the dial area. The specific method is: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com