Active-disturbance-rejection control device and control method based on same
A technology of active disturbance rejection control and control method, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of large control error, unsatisfactory control performance, and violent fluctuation of the controlled amount of control error, to achieve Satisfied with the effect of the control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
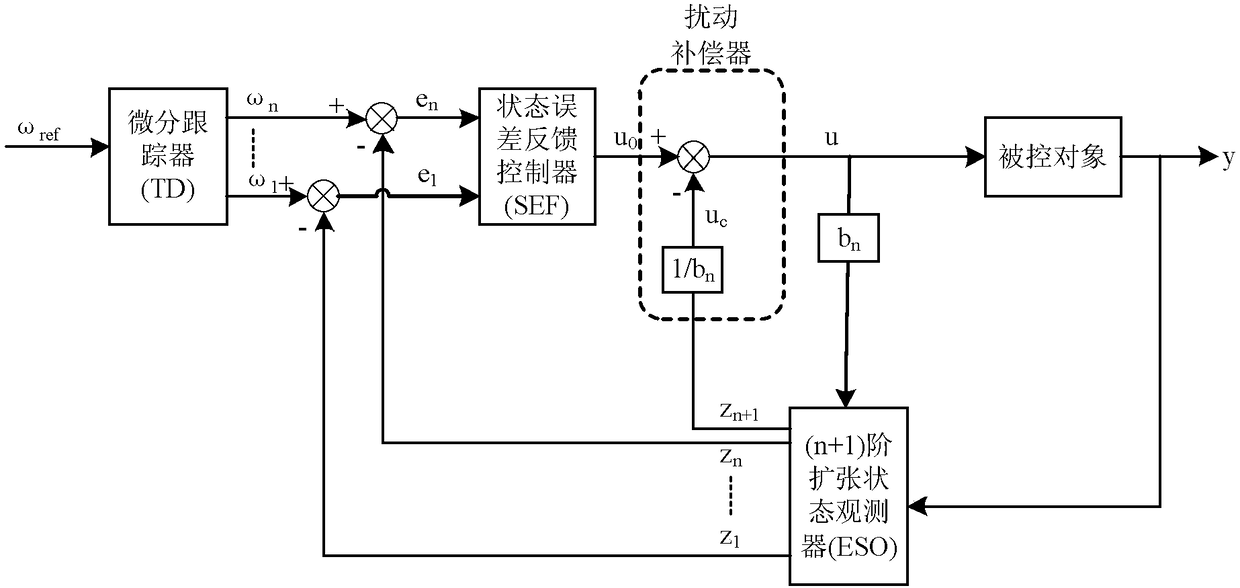
[0040] Active disturbance rejection control devices, such as figure 1 shown, which includes:
[0041] Extended State Observer (ESO), which estimates the total disturbance of the controlled object and outputs the estimated value of the total disturbance;
[0042] State error feedback controller (SEF), which generates error control instructions according to the control target value and the output of the controlled object;
[0043] a disturbance compensator, generating a total control instruction according to the total disturbance estimated value of the controlled object and the error control instruction, and controlling the controlled object;
[0044] Initial value acquisition unit: used to acquire the initial value, the initial value includes the initial value of the output of the controlled object determined according to the prior knowledge of the controlled object, the initial value of the k-order differential value of the output of the controlled object or according to One...
Embodiment 2
[0083] Based on the first embodiment, the last state variable of the extended state observer (ESO) is assigned an estimated value of the total disturbance initial value of the controlled object, and the other state variables are set to zero.
[0084] The control method based on the active disturbance rejection control device of the second embodiment includes the following steps:
[0085] H1. Estimate the initial value of the total disturbance of the controlled object;
[0086] H2. Assign the estimated value of the total disturbance initial value of the controlled object to the last state variable of the expanded state observer, and set the rest of the state variables of the expanded state observer to zero;
[0087] H3. Estimate the total disturbance of the controlled object through the extended state observer; generate an error control instruction according to the control target value and the output of the controlled object through a state error feedback controller;
[0088] ...
Embodiment 3
[0094] Based on the first embodiment, in the extended state observer (ESO), the first state variable is assigned as the initial value of the output of the controlled object, and the last state variable is assigned as the estimated initial value of the total disturbance of the controlled object, Its other state variables are set to zero.
[0095] The control method of the active disturbance rejection control device of the third embodiment includes the following steps:
[0096] J1. Determine the initial value of the output of the controlled object; estimate the initial value of the total disturbance of the controlled object;
[0097] J2. Assign the initial value of the output of the controlled object to the first state variable of the extended state observer, assign the estimated value of the initial value of the total disturbance of the controlled object to the last state variable of the extended state observer, and set The remaining state variables of the extended state obser...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com