Tornambe nonlinear robust controller and its parameter tuning method and system
A robust controller and parameter tuning technology, which is applied in general control systems, control/adjustment systems, adaptive control, etc., can solve problems such as slow response speed, and achieve the effect of improving efficiency and facilitating application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The solution of the present invention will be described in detail below in combination with the preferred embodiments thereof.
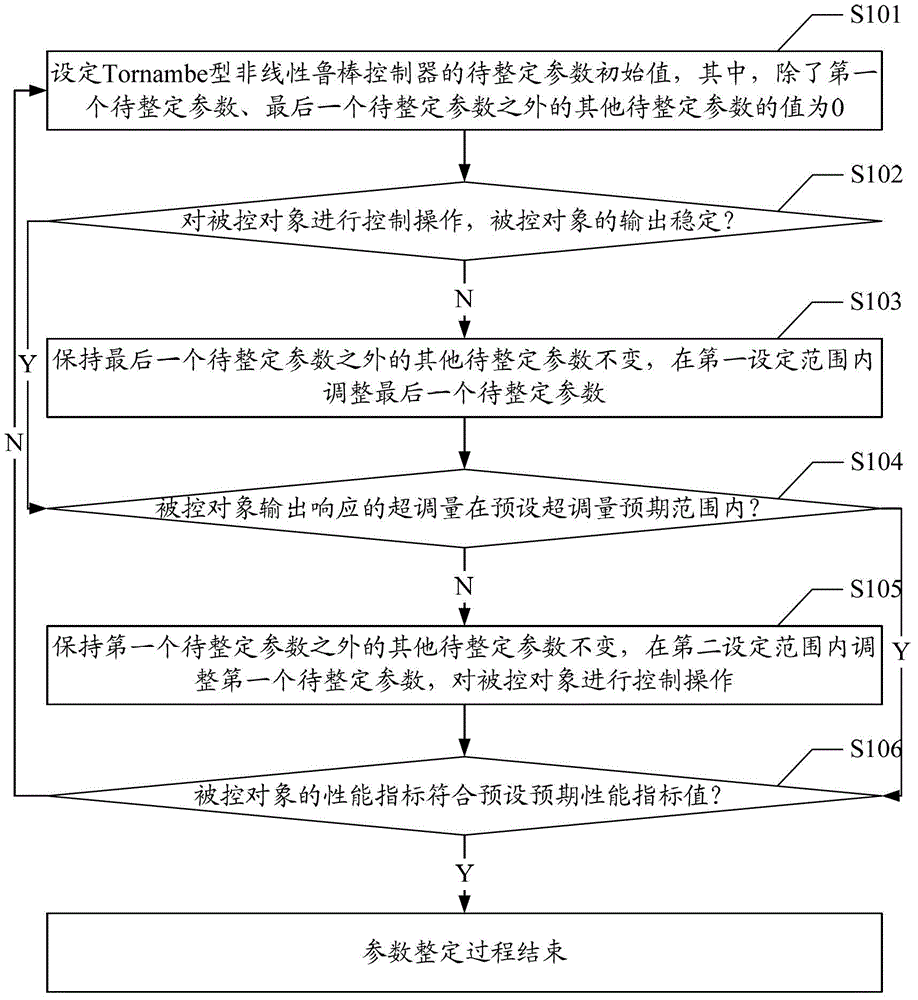
[0024] figure 1 A schematic flowchart of an embodiment of a method for parameter tuning of a Tornambe-type nonlinear robust controller of the present invention is shown in .
[0025] Such as figure 1 As shown, the method in this embodiment includes steps:
[0026] Step S101: Set the initial value of the parameters to be tuned for the Tornambe nonlinear robust controller, where, except for the first parameter to be tuned k 0 , the last parameter k to be tuned r-1 The values of other parameters to be tuned are 0;
[0027] Step S102: Perform a control operation on the controlled object to determine whether the output of the controlled object is stable, if not, go to step S103, if stable, go to step S104;
[0028] Step S103: Keep the last parameter k to be tuned r-1 Other parameters to be tuned remain unchanged, adjust the last parameter k...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com