An operating method of an axis-rotating mechanism based on stereo vision servo
A technology of rotating around an axis and stereoscopic vision, which is applied in the directions of manipulators, program-controlled manipulators, image analysis, etc., and can solve the problems of low automation, high cost, and low flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
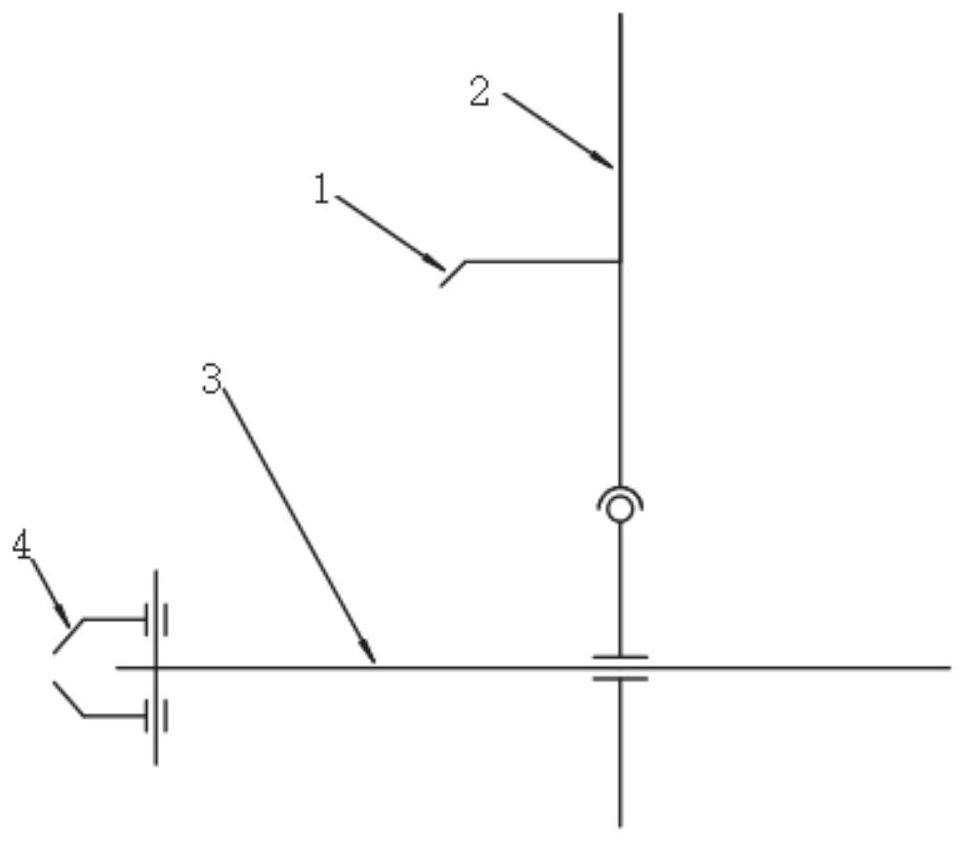
[0055] The mechanism used in this embodiment to operate the axis-rotating mechanism includes a depth information collection unit, an optical collection unit, a calibration module and a mechanical arm. The depth information collection unit is used to collect depth information, and the optical collection unit is used to collect optical images. The depth information collection unit and the optical collection unit can be realized by a depth camera. The structure of the mechanical arm is as figure 2 As shown, it includes the main base 2 of the mechanical arm and the screw rod 3 installed on the main base 2 of the mechanical arm. The screw rod 3 can rotate and stretch accordingly under a controlled state. The depth camera 1 is fixed on the main base 2 of the manipulator, and its information collection field of view includes the end of the manipulator and the front target of the manipulator. The calibration module is a cube fixed at the end of the screw 3, and its normal vector i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com