A sensorless brushless DC motor freewheeling interference compensation method
A brushed DC motor, interference compensation technology, applied in the direction of electronic commutation motor control, electrical components, electronic commutator, etc., can solve the problem of no freewheeling interference compensation, and achieve the effect of eliminating freewheeling interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
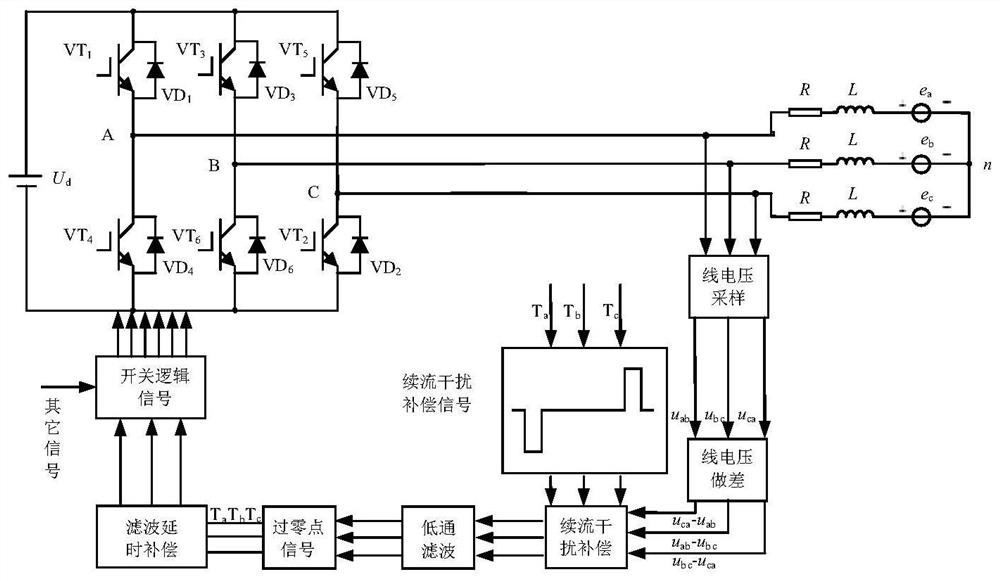
[0067] The three-phase full-control bridge inverter circuit adopts the conduction mode of two-two, each power tube is turned on for 120°, and the phase is commutated every 60 degrees of electrical angle. The brushless DC motor used adopts a trapezoidal wave with a flat top of 120° back EMF, and the modulation method used is Hpwm-Lon. The frequency converter is IPM (PM50RL1A060), the core controller is FPGA (EP3C25Q240C8N), and the specific parameters of the motor are shown in Table 1.
[0068] Table 1 BLDC motor parameters
[0069]
[0070] Use the voltage sensor to sample the line voltage signal, make a difference, filter the line voltage difference signal, and the zero-crossing point of the filtered line voltage difference signal lags 30° as the commutation signal of the brushless DC motor position sensorless control system, but Due to the existence of the filter and the existence of the freewheeling interference signal, the obtained commutation signal has a certain erro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com