Human-vehicle coordinative steering rolling optimization control method based on driver in the loop
A control method and rolling optimization technology, applied in the direction of automatic steering control components, steering mechanisms, steering rods, etc., can solve the problem of easy misuse by drivers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0097] The present invention is described in detail below in conjunction with accompanying drawing:
[0098] The present invention proposes a driver-in-the-loop cooperative steering roll optimization control method, such as figure 1 As shown, the specific implementation steps are as follows:
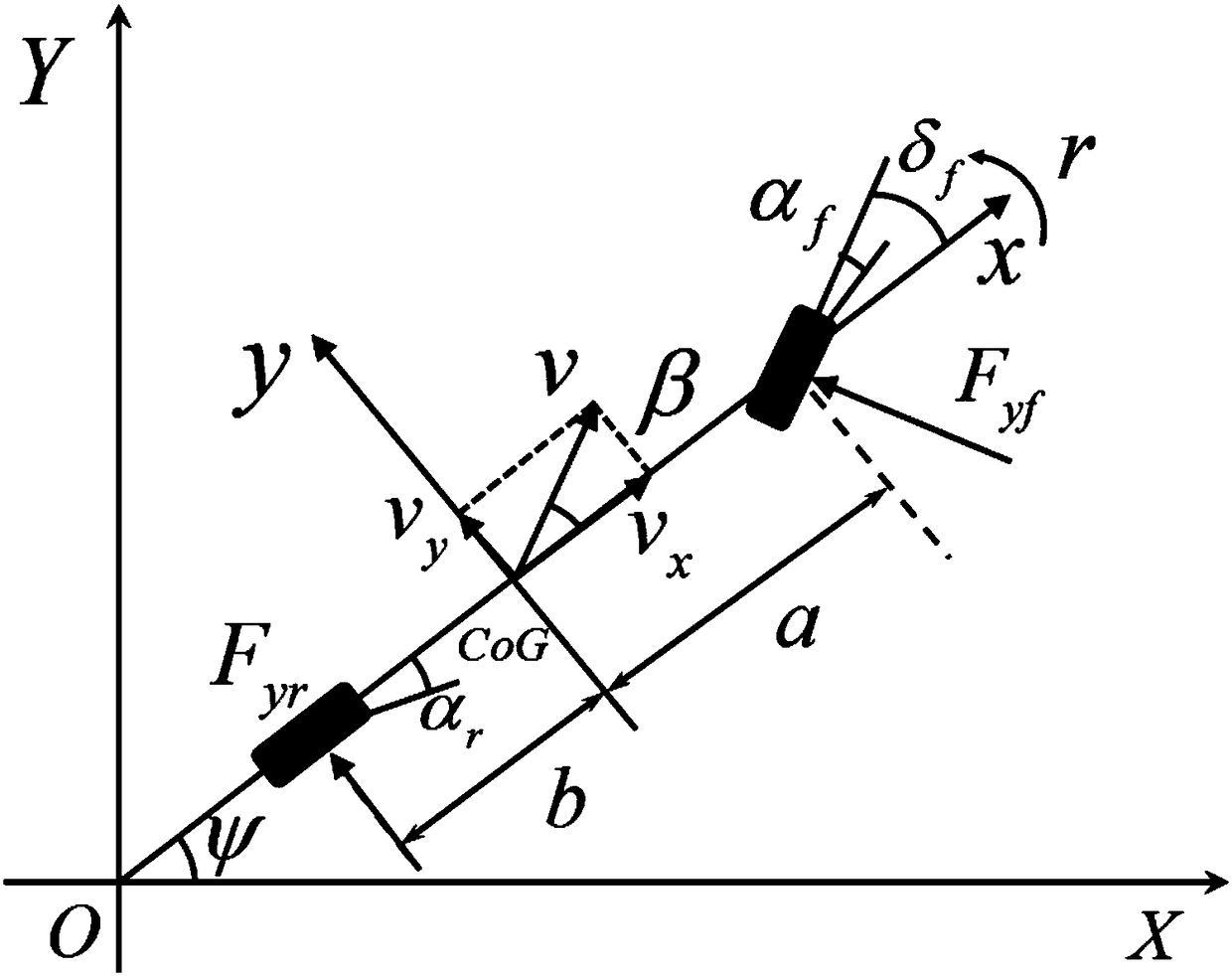
[0099] Step 1. Establish vehicle two-degree-of-freedom dynamics model and vehicle kinematics model:
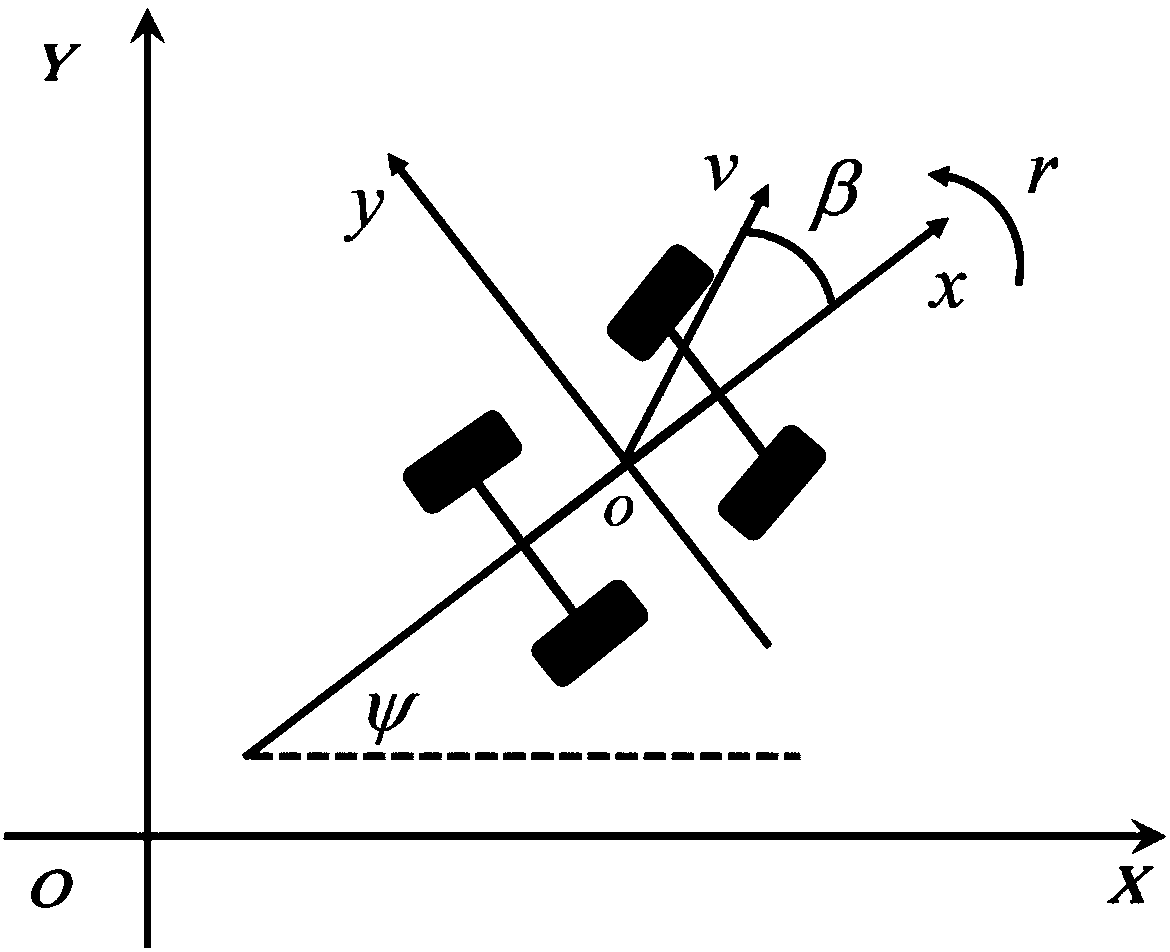
[0100] Establish a geodetic coordinate system: the origin O is fixed on the ground, the X-axis usually coincides with the initial movement direction of the vehicle, and the direction of the X-axis rotating 90 degrees counterclockwise is the positive direction of the Y-axis to establish a geodetic coordinate system;
[0101] Establish a vehicle coordinate system: take the center of mass o of the vehicle in the vehicle dynamics model as the coordinate origin, the direction along which the vehicle advances is the positive direction of the x-axis, and the direction in which the x-axis rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com