Robot feedforward force moment compensation method
A compensation method and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult identification, many dynamic model parameters, and reduced dynamic model accuracy, and achieve the effect of improving the effect and wide adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] To further illustrate the various embodiments, the present invention is provided with accompanying drawings. These drawings are a part of the disclosure of the present invention, which are mainly used to illustrate the embodiments, and can be combined with related descriptions in the specification to explain the operating principles of the embodiments. With reference to these contents, those skilled in the art should understand other possible implementations and advantages of the present invention. Components in the figures are not drawn to scale, and similar component symbols are generally used to denote similar components.
[0042] The present invention will be further described in conjunction with the accompanying drawings and specific embodiments.
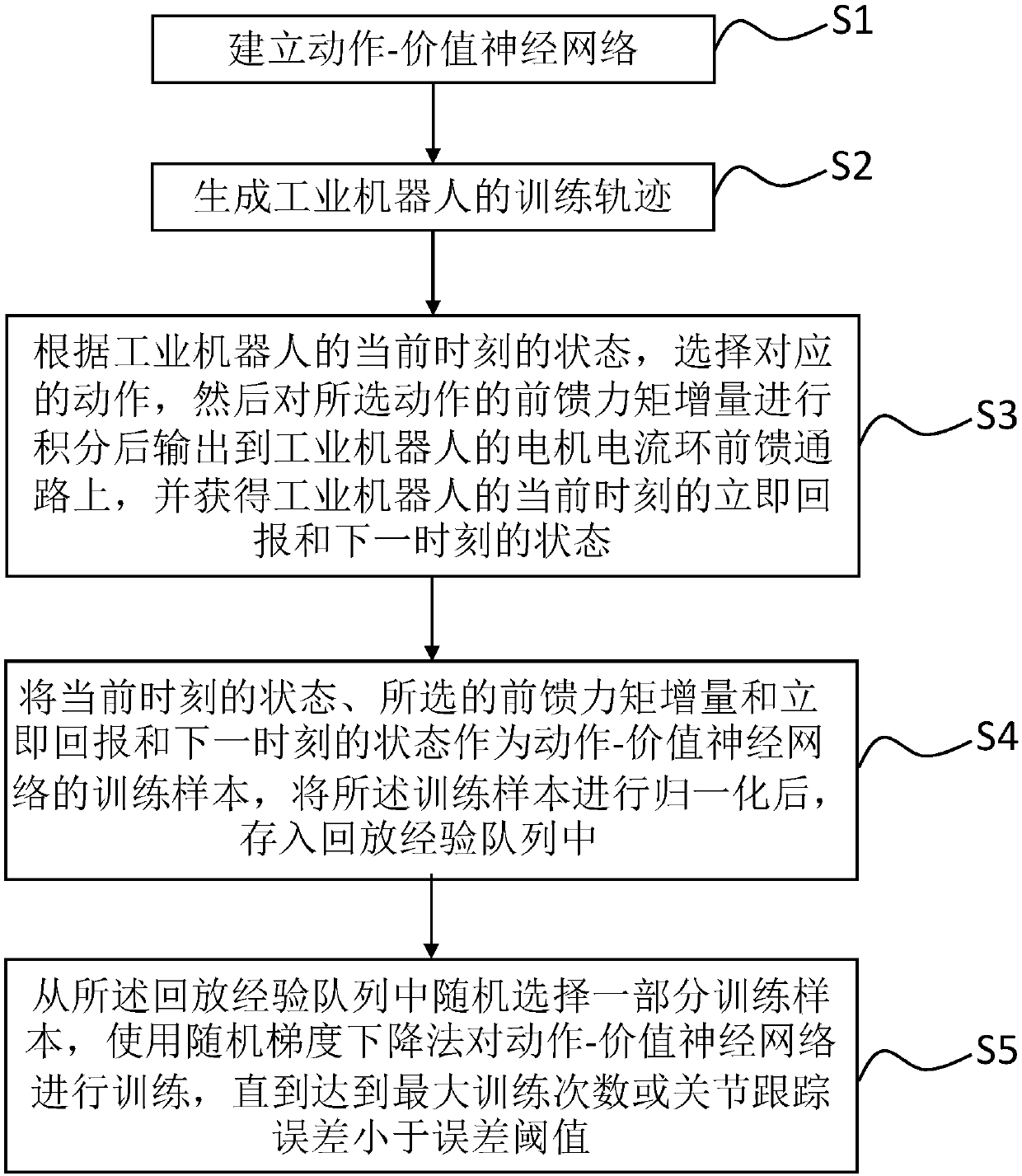
[0043] An embodiment of the present invention provides a robot feedforward torque compensation method, such as figure 1 As shown, it is a schematic flow chart of the robot feedforward torque compensation method describ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com