Direction-adjusting blade driving mechanism for intelligent underwater robot
An underwater robot and driving mechanism technology, applied in the field of robots, can solve the problems of limited driving direction of the driving mechanism and inability to change the driving direction, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
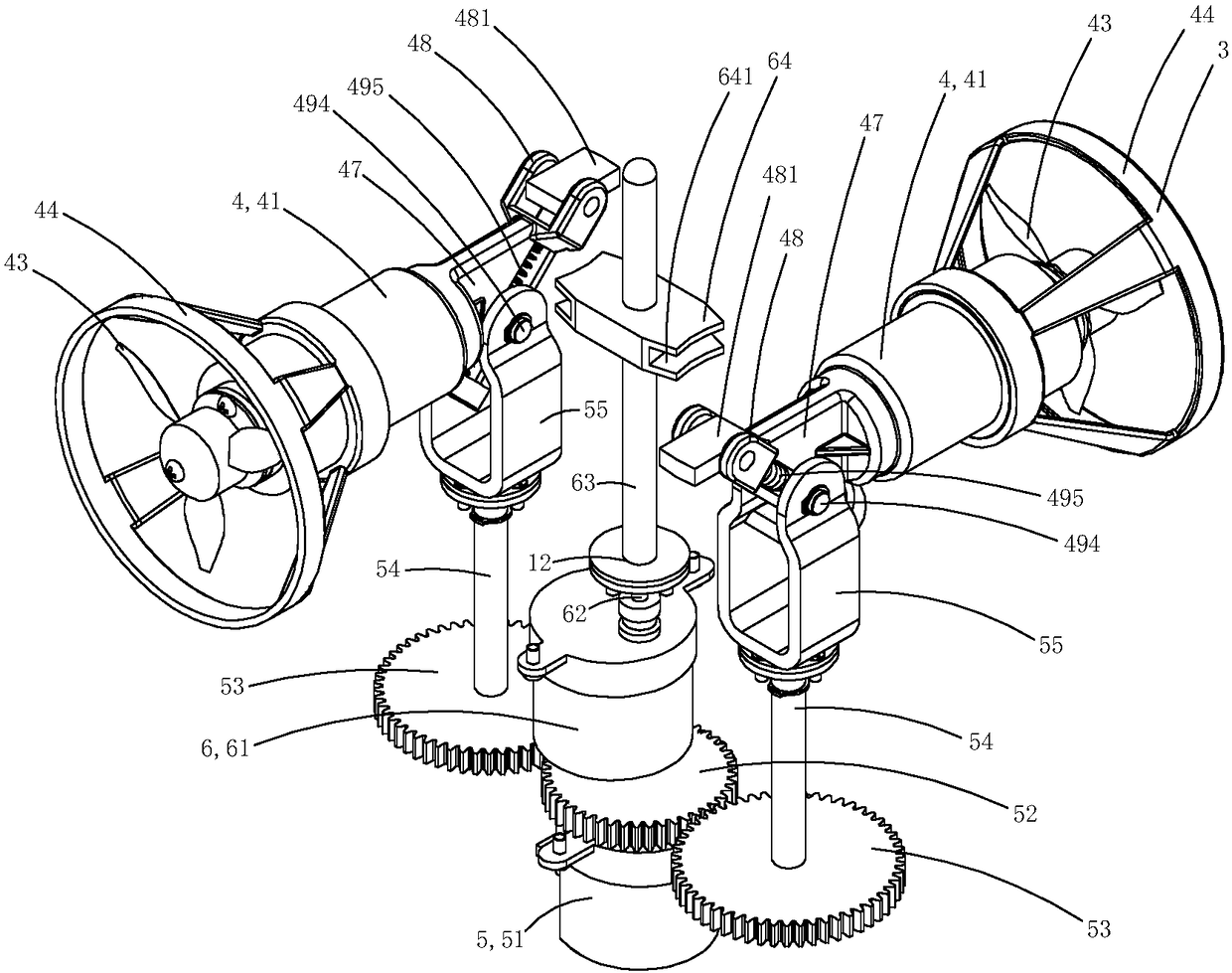
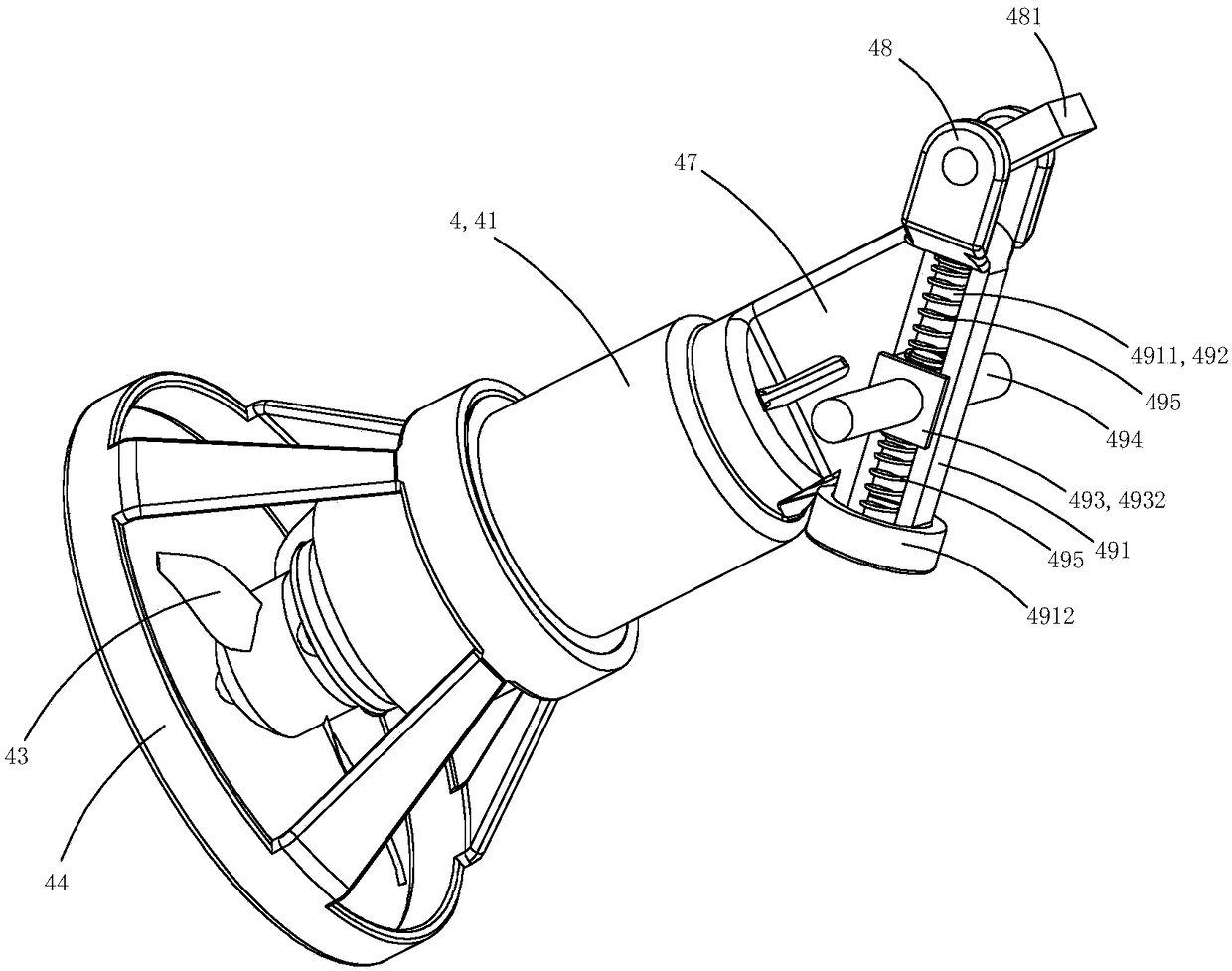
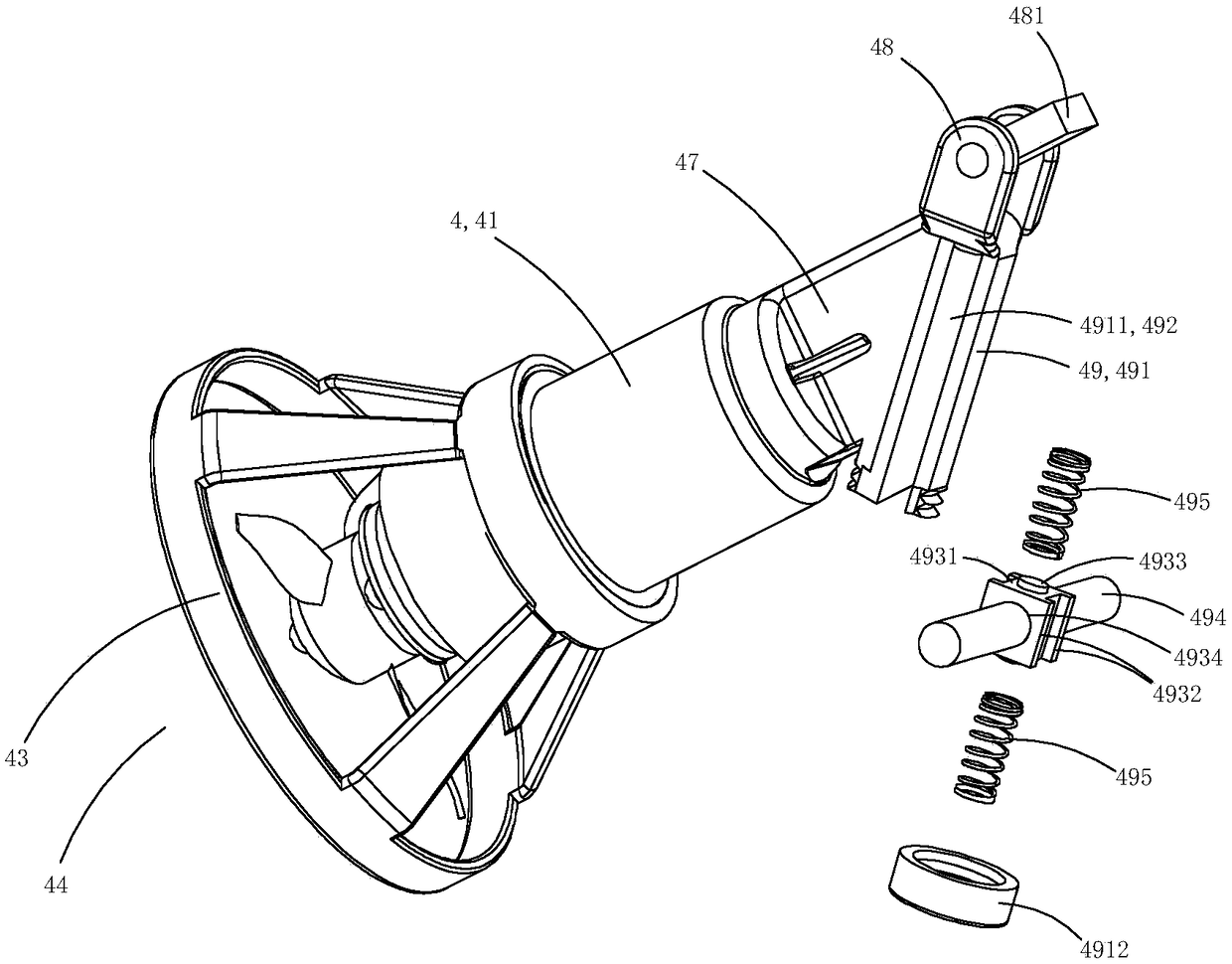
[0023] This embodiment is a kind of steering blade drive mechanism for intelligent underwater robot, see Figure 1 to Figure 3 As shown, the steering blade drive mechanism 3 includes two blade drivers 4, a first steering mechanism 5 for synchronously driving the two blade drivers to rotate in the first plane, and a first steering mechanism 5 for driving the blade drivers to rotate in the first plane. The second direction adjustment driving mechanism 6 rotating in the second plane; the first plane is perpendicular to the second plane; when the present embodiment is in a free state only under the action of gravity, the first plane is a horizontal plane, and the second plane is a vertical plane .
[0024] Each paddle driver 4 comprises a sealed chamber 41, a power supply arranged in the sealed chamber, a paddle 43 which is rotated to be arranged on the sealed chamber, a protective cover 44 arranged on the outer wall of the sealed chamber for protecting the paddle, and a protectiv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com