Distributed control method and system for modular robot
A decentralized control and decentralized control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem that the control algorithm does not meet the requirements of modular robot control, achieve high precision and high stability, and reduce the volume. , the effect of reducing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
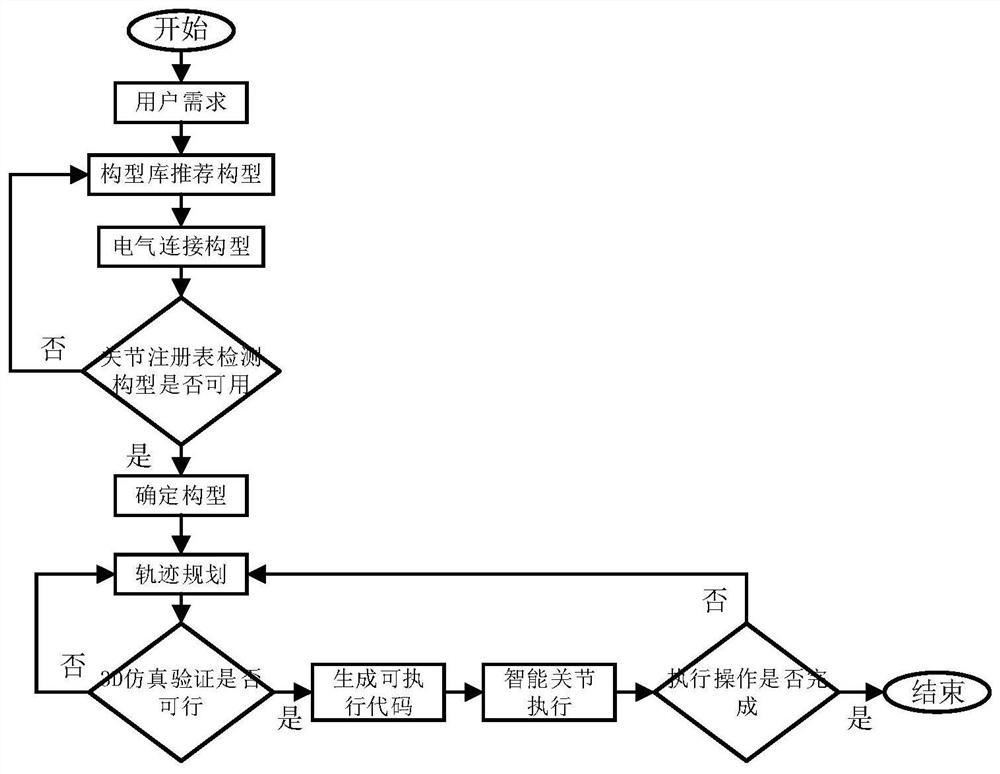
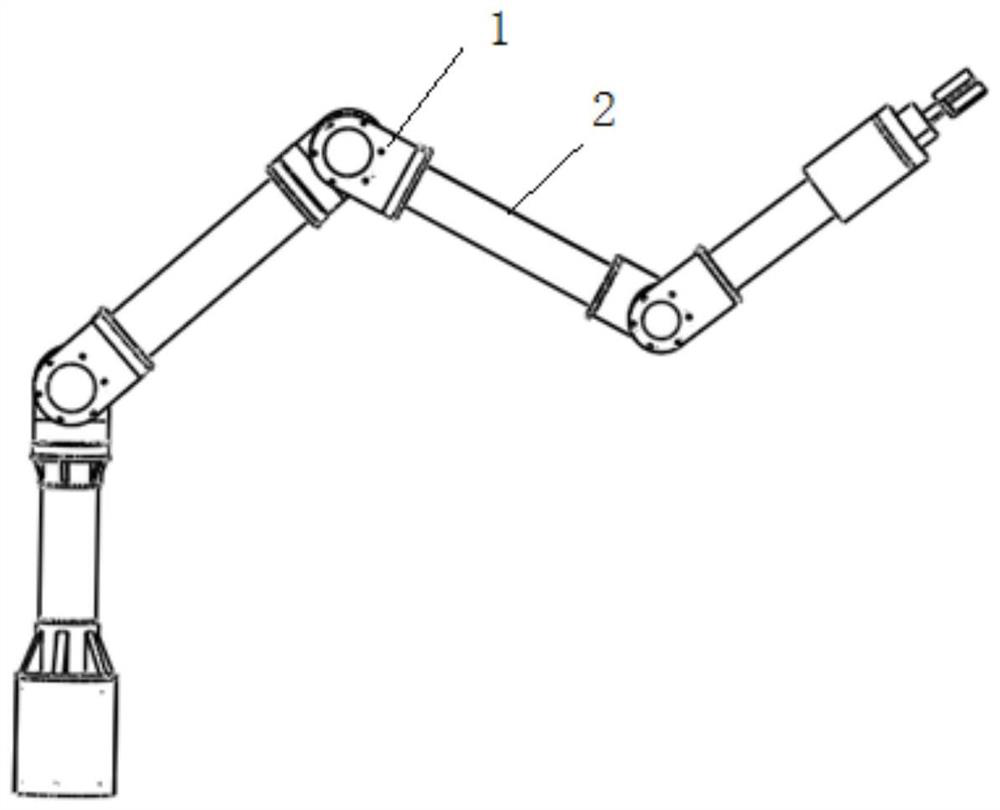
[0040] A method and system for decentralized control of a modular robot according to an embodiment, the control system is composed of a host computer and an intelligent joint 1, which are connected through an Ether CAT bus. First, according to the user's needs, the configuration is determined based on the configuration library and joint registry information; motion planning is performed; then 3D simulation verification is performed; after the simulation is correct, the position execution command is generated, and the command is transmitted to the intelligent joint 1 through the Ether CAT bus. Joint controller 15; as the control center of the intelligent joint 1, the joint controller 15 integrates various information such as the torque sensor 12 and the encoder, and realizes joint trajectory tracking control based on the distributed joint control algorithm, and finally realizes the control of the entire robot system.
[0041] A kind of modular robot decentralized control method ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com