Method of estimating motion parameters of linear global camera in multi-view reconstruction
A camera motion and parameter estimation technology, applied in the field of multi-view geometry and 3D reconstruction, can solve the problems of low precision, complex calculation, noise sensitivity, etc., and achieve the effect of overcoming initialization error, simple calculation, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
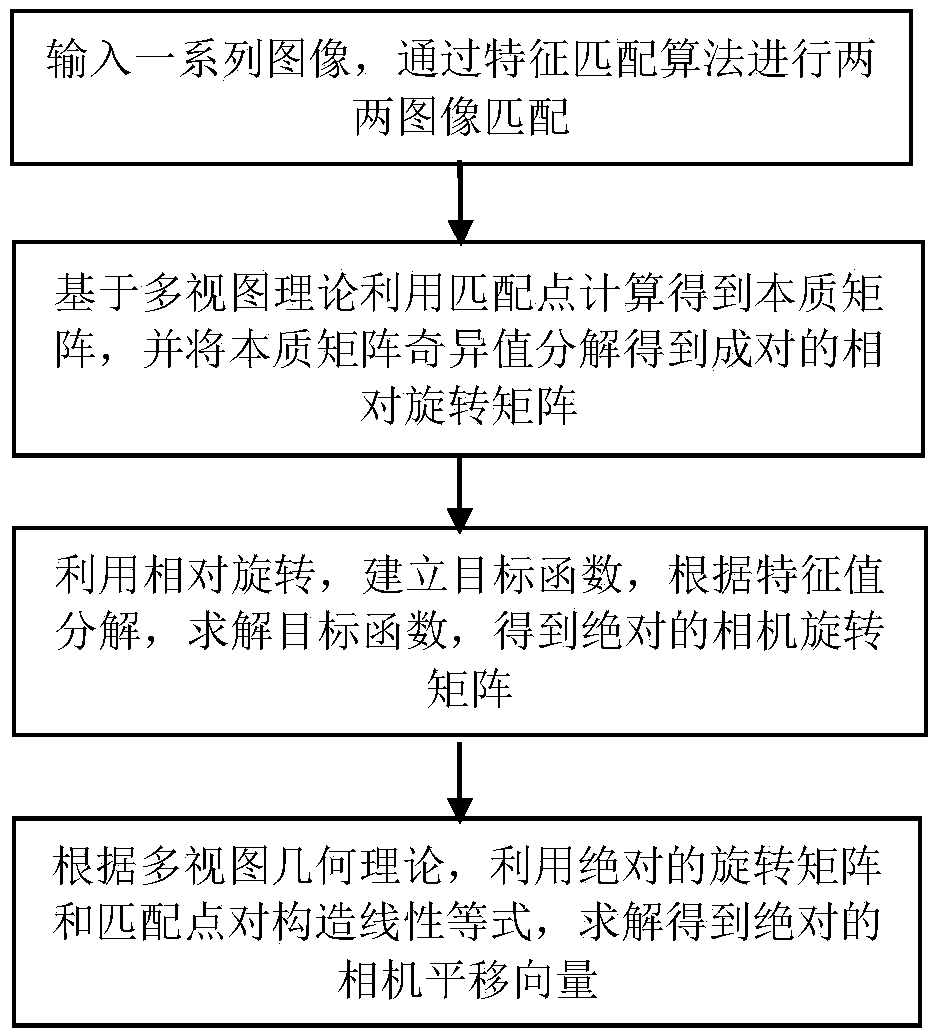
[0042] The present invention provides a linear global camera motion parameter estimation method in multi-view reconstruction. Based on feature point matching and multi-view geometry theory, firstly, pairwise matching is performed from a series of images of fixed scenes to obtain matching point pairs. From the matching point pairs Calculate the paired essential matrix, decompose the essential matrix to obtain the paired relative rotation matrix; then use these paired relative rotations to perform global optimization according to the objective function to obtain the absolute rotation matrix; then find out the essential matrix by multi-view geometry theory A new expression of , combined with image feature point pairs to construct a linear equation system, and solve the absolute translation vector, such as figure 1 As shown, the method of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com