


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Underwater structured environment line feature extraction method based on forward looking sonar
A technology of underwater structure and extraction method, which is applied in the direction of sound wave re-radiation, radio wave measurement system, utilization of re-radiation, etc., can solve problems such as easy ambiguity, low efficiency, poor real-time performance, etc., to overcome blindness and ambiguity performance, improve execution efficiency and real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0062] Example 1: Combining Figure 1 to Figure 6 The underwater structured environment line feature extraction method based on forward-looking sonar of the present invention comprises:
[0063] Step 1. Carry out dynamic threshold segmentation on the forward-looking sonar data, and obtain the total points of high echo intensity points and their polar coordinates under the carrier system;
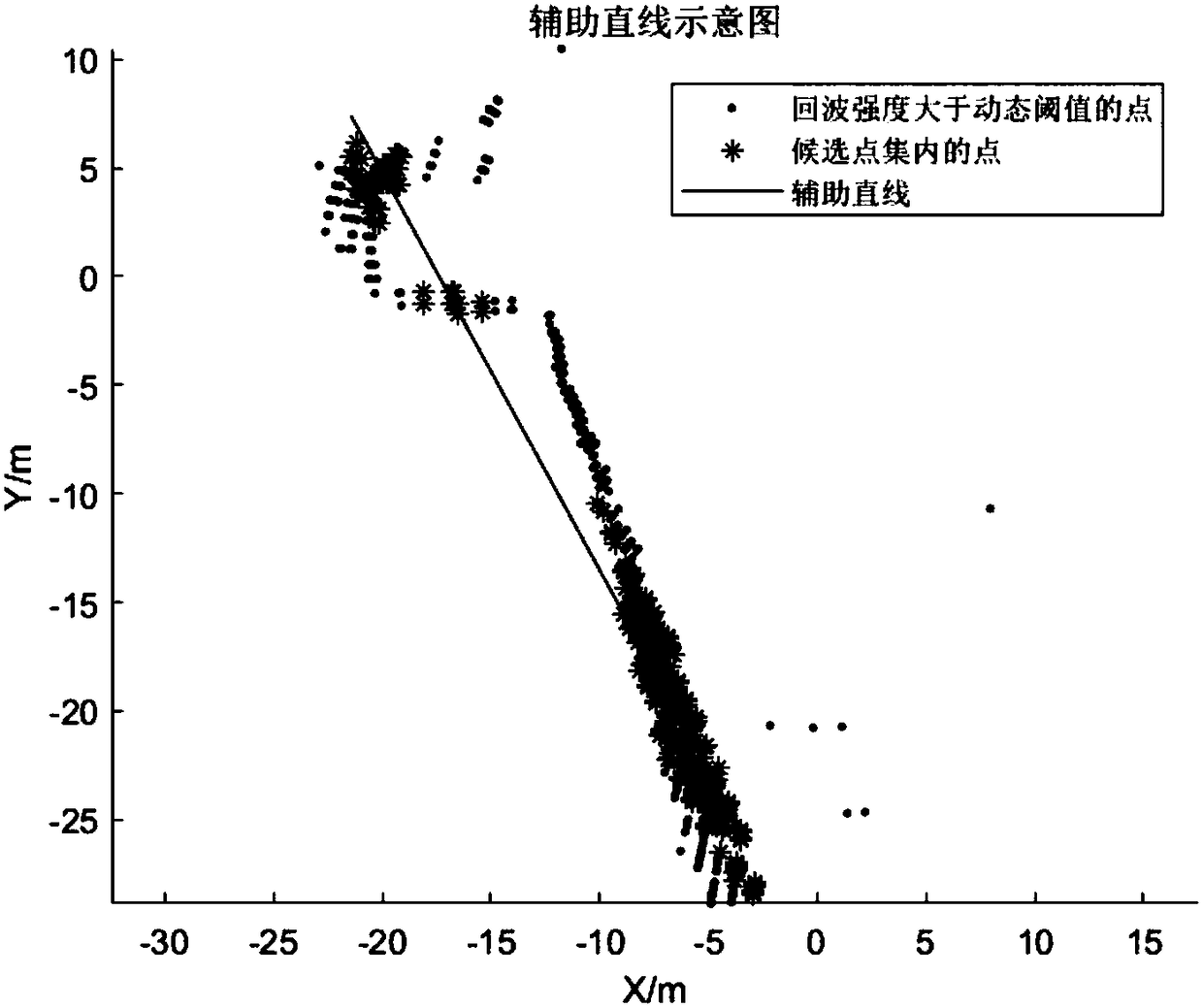
[0064] Step 2: Randomly select two non-isolated and non-adjacent points from the high echo intensity points within the limited number of cycles to construct a straight line, select points whose distance from the straight line is less than the preset threshold to form a candidate point set, and calculate the candidate point set The ratio of the potential to the total number of points, if the ratio is not less than the threshold, the straight line is used as an auxiliary straight line and the loop is terminated;
[0065] Step 3. Based on the auxiliary straight line parameters and the distribu...
Embodiment 2
[0068] Embodiment 2: Based on the above embodiment, step 1 is specifically:
[0069] Step 11: Collect forward-looking sonar data within a certain sonar opening angle range, perform dynamic threshold segmentation on the forward-looking sonar data, obtain high echo intensity points and calculate the number of high echo intensity points.
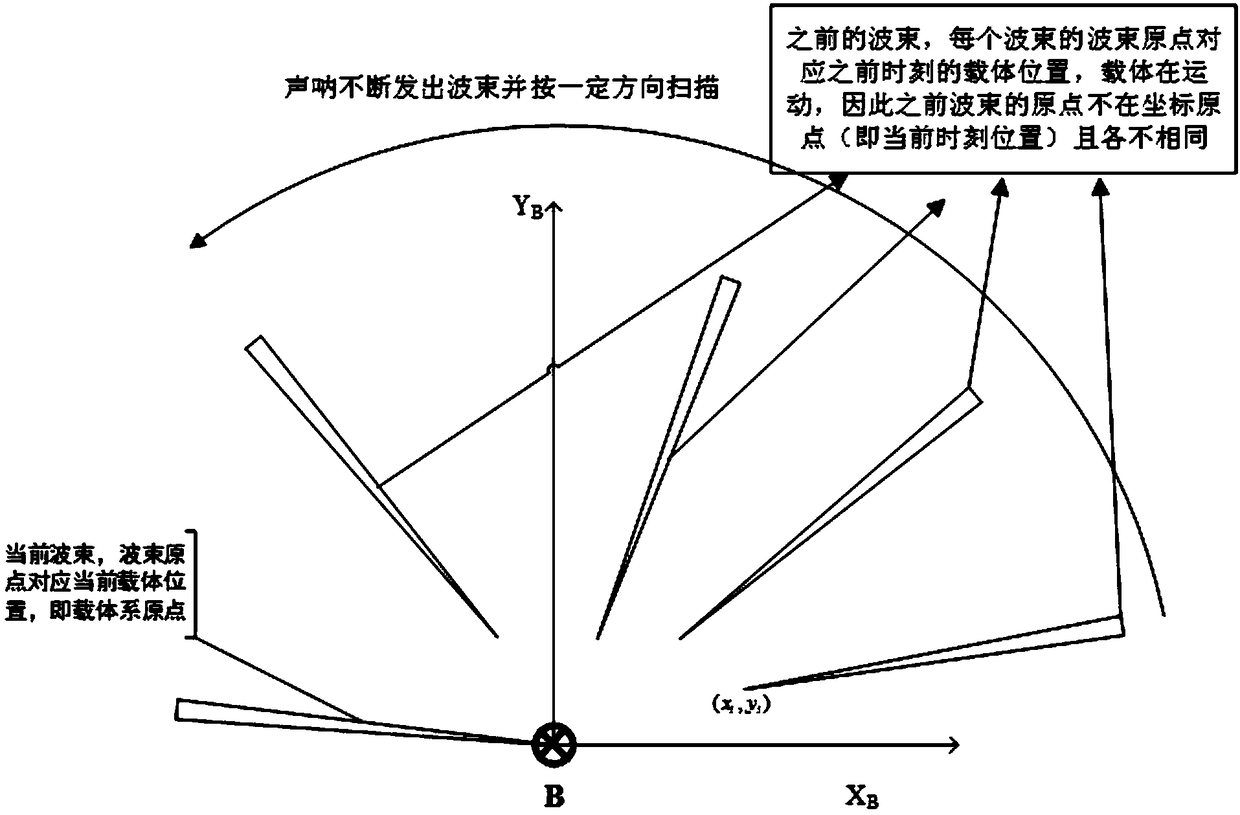
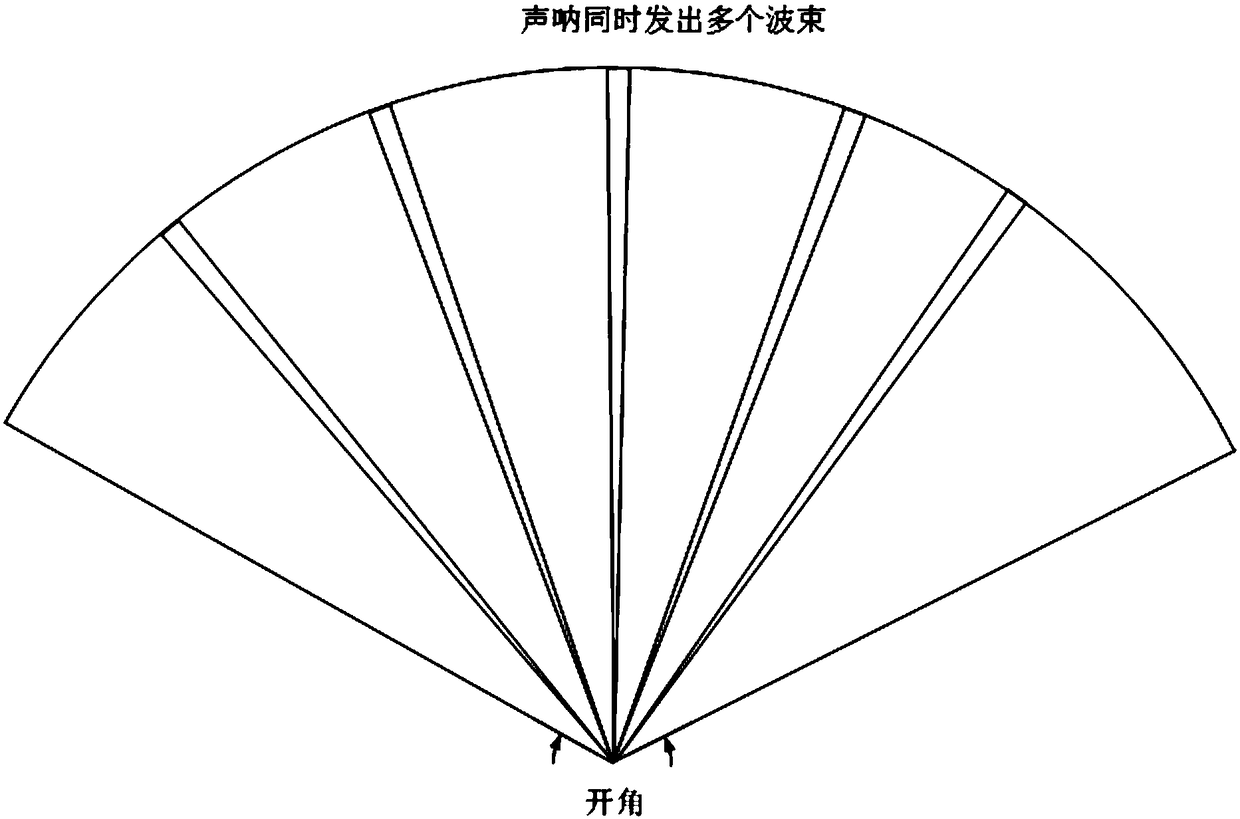
[0070] It should be noted that the forward-looking sonar in the present invention mainly refers to single-beam mechanical scanning imaging sonar and 2D multi-beam imaging sonar. Both sonars realize environmental detection by detecting the echo intensity at equally spaced points within the detection distance, and the relative positions of the origins of their detection beams under the carrier system are as follows: figure 1 and figure 2 shown. For example, a single-beam mechanical scanning imaging sonar continuously emits a beam and scans in a certain direction. The detection distance of the sonar beam is 50m, and the sonar will return the de...
Embodiment 3
[0079] Embodiment 3: Based on the above embodiments, step 2 is specifically:
[0080] Step 21: Set the maximum calculation times of the auxiliary straight line.
[0081] In order to obtain the auxiliary straight line required in the subsequent steps in a short period of time, the algorithm must complete the calculation of the auxiliary straight line within a limited number of times, so a smaller fixed value not exceeding 10 is set as the maximum calculation times of the auxiliary straight line.
[0082] Step 2 and 2: Among the high echo intensity points, randomly select two points. The selected point cannot be the only isolated point on the entire beam whose echo intensity is greater than the threshold, and it should satisfy that the point is adjacent to two positions on the beam. The echo intensities are greater than the threshold; and the selected two points are on two different beams, and there is at least a certain number of beams between the two beams. The setting of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com