Improved fuzzy-PID intelligent automobile automatic tracking method
An automatic tracking and smart car technology, which is applied in the field of smart car automatic road identification, automatic tracking, and fuzzy PID smart car automatic tracking, to achieve the effect of reducing the complexity of parameter adjustment, improving inaccuracy, and improving control sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in detail below in combination with specific embodiments.
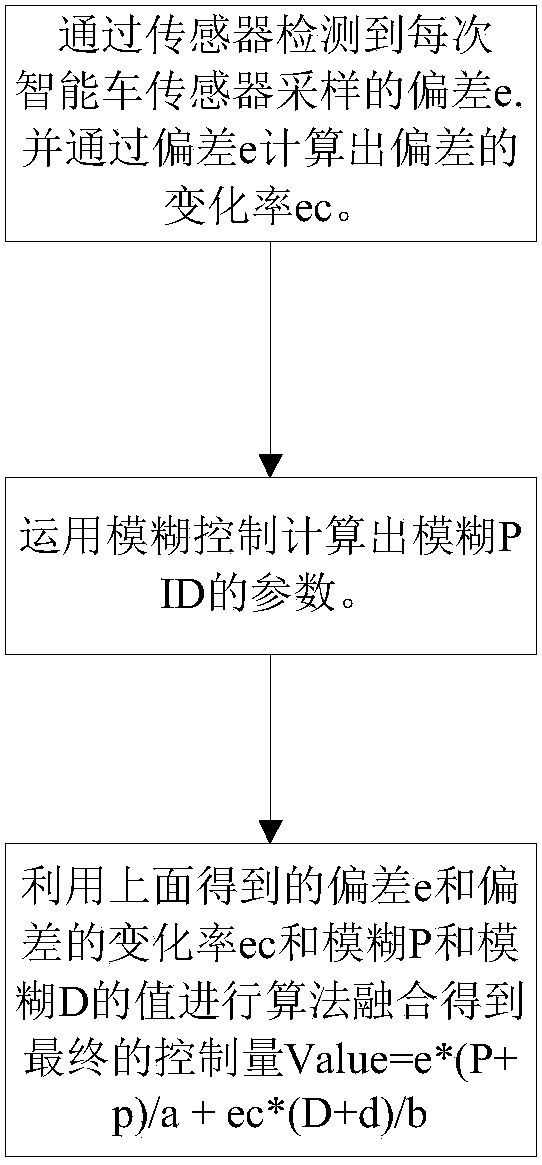
[0058] A kind of improved fuzzy PID intelligent car automatic tracking method implementation flow that the present invention proposes is as follows image 3 shown. The method of the present invention comprises the following steps:
[0059] Step (1): Detect the deviation e of each smart car sensor sampling through the sensor, and calculate the change rate ec of the deviation through the deviation e. Through sensor signal collection, the deviation e1 of the smart car's deviation from the track is obtained. When a collection cycle ends, the second signal collection is performed to obtain the deviation e2. Then the deviation change rate ec1=e2-e1 at this time can be calculated. Similarly, the deviation e and deviation change rate ec of each subsequent sampling period can be obtained.
[0060] Step (2): Use fuzzy control to calculate the parameters of fuzzy PID. Since th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com