Controllable finger capable of being bent in multiple directions
A finger and bending direction technology, applied in the field of controllable fingers, can solve the problems of complex maintenance, short service life and high cost, and achieve the effects of simple maintenance, long service life and simple production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, but not as a basis for limiting the present invention.
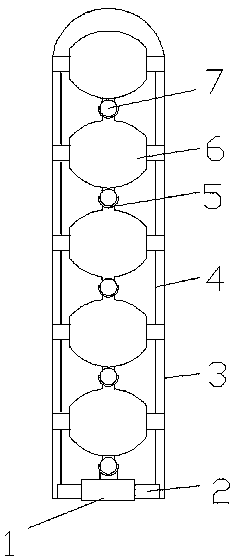
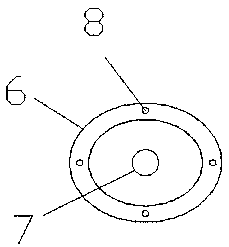
[0016] Example. A finger with controllable bending direction, constituted as Figure 1-4 As shown, it includes a group of gyro unit sections 6. A spherical joint 7 is provided at the axis of the lower end of the gyro unit section 6, and an arc-shaped connecting sleeve 5 is provided at the other end. The spherical joint 7 between adjacent gyro unit sections 6 Set in the arc-shaped connecting sleeve 5, the spherical connecting joint 7 at the lower end of the bottommost gyro unit section 6 is arranged in the arc-shaped connecting sleeve 5, the arc-shaped connecting sleeve 5 is connected to the fixed end 1, and the topmost gyro unit section 6 The upper end surface is arc-shaped, and the lower end is provided with the spherical joint 7; four traction holes 8 are evenly distributed around the gyro unit s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com