


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
An autonomous mobile robot and its control method and device for automatic docking
A technology of automatic docking and autonomous movement, applied in the field of robotics, can solve problems such as poor accuracy, and achieve the effect of accurate docking, high precision and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
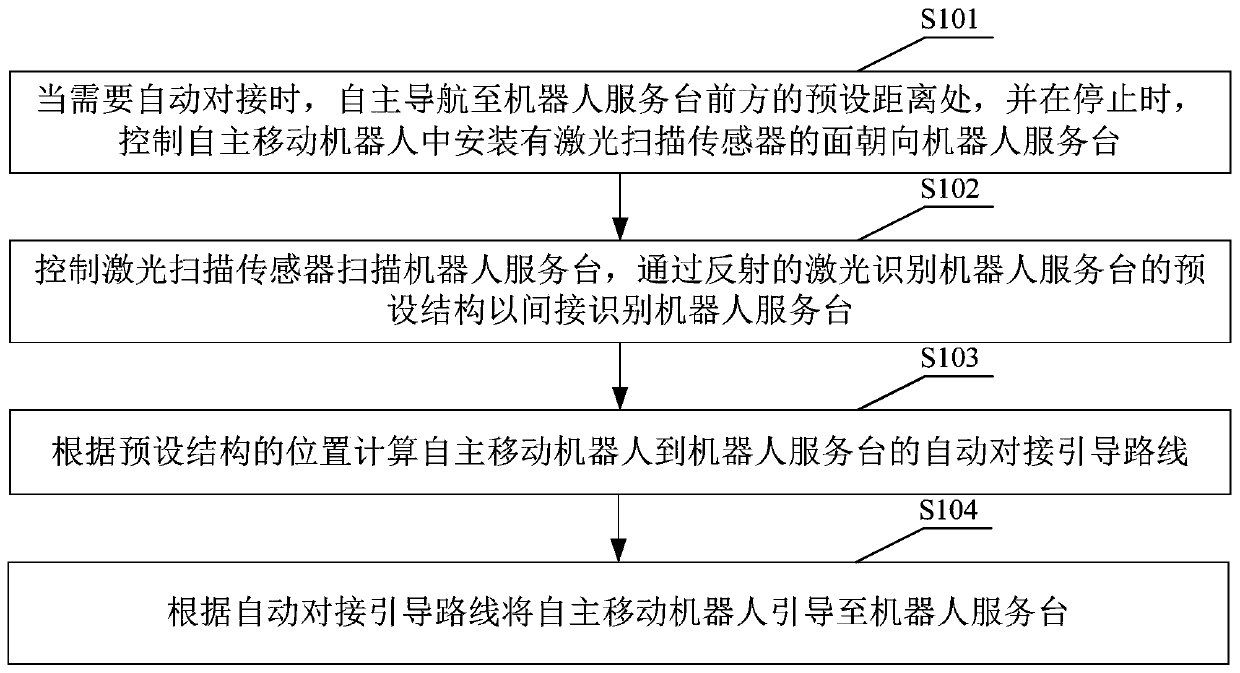
[0042] see figure 1 , the control method for the automatic docking of the autonomous mobile robot provided in Embodiment 1 of the present invention includes the following steps: It should be noted that if there are substantially the same results, the control method for the automatic docking of the autonomous mobile robot of the present invention does not use figure 1 The flow sequence shown is limited.
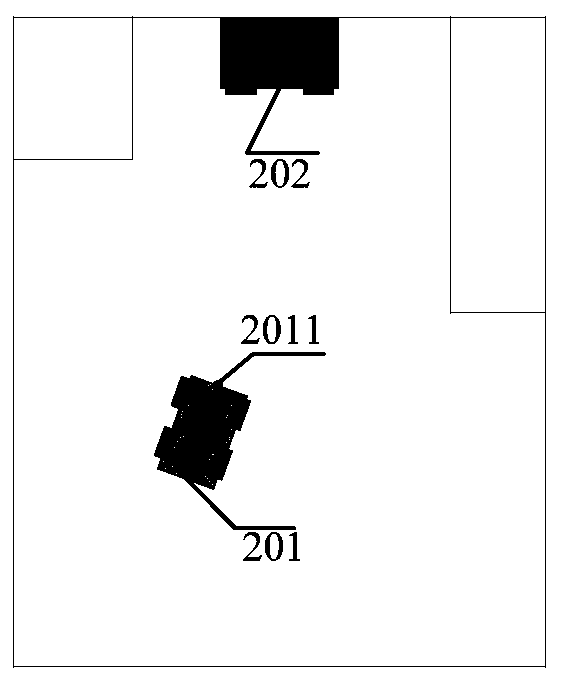
[0043] S101. When automatic docking is required, autonomously navigate to a preset distance (for example, 2 meters) in front of the robot service desk, and when stopped, control the surface 2011 on which the laser scanning sensor is installed in the autonomous mobile robot 201 to face the robot service desk 202 (such as figure 2 shown).
[0044] In Embodiment 1 of the present invention, before S101, the method further includes the following steps:
[0045] Determine whether the autonomous mobile robot needs to be automatically docked to the robot service desk, and if so, e...
Embodiment 2
[0084] see Figure 11 , the control device for automatic docking of an autonomous mobile robot provided in Embodiment 2 of the present invention includes:
[0085] The control module 11 is used for autonomously navigating to the preset distance in front of the robot service desk when automatic docking is required, and when stopping, controls the autonomous mobile robot where the laser scanning sensor is installed to face the robot service desk;
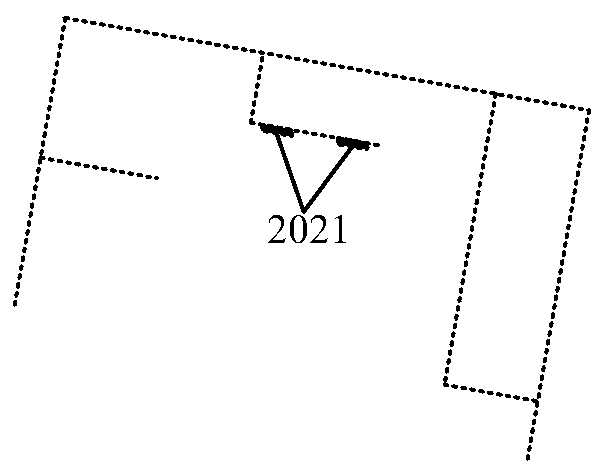
[0086] The identification module 12 is used to control the laser scanning sensor to scan the robot service station, and indirectly identify the robot service station through the reflected laser to identify the preset structure of the robot service station. The robot service station with the preset structure faces the laser scanning sensor;
[0087] The route calculation module 13 is used to calculate the automatic docking guide route from the autonomous mobile robot to the robot service station according to the position of the preset ...
Embodiment 3
[0091] Embodiment 3 of the present invention also provides a computer-readable storage medium, the computer-readable storage medium stores a computer program, and when the computer program is executed by a processor, the autonomous mobile robot provided in Embodiment 1 of the present invention automatically Steps of the control method for docking.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com