Mobile phone APP control method of unmanned aerial vehicle supporting ROS
A control method and mobile phone technology, applied in the field of drones, can solve the problems of lack of versatility, large measurement errors, and increased flight instability of drones, and achieve high versatility, low cost, and simple operation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the description of the drawings and specific embodiments.
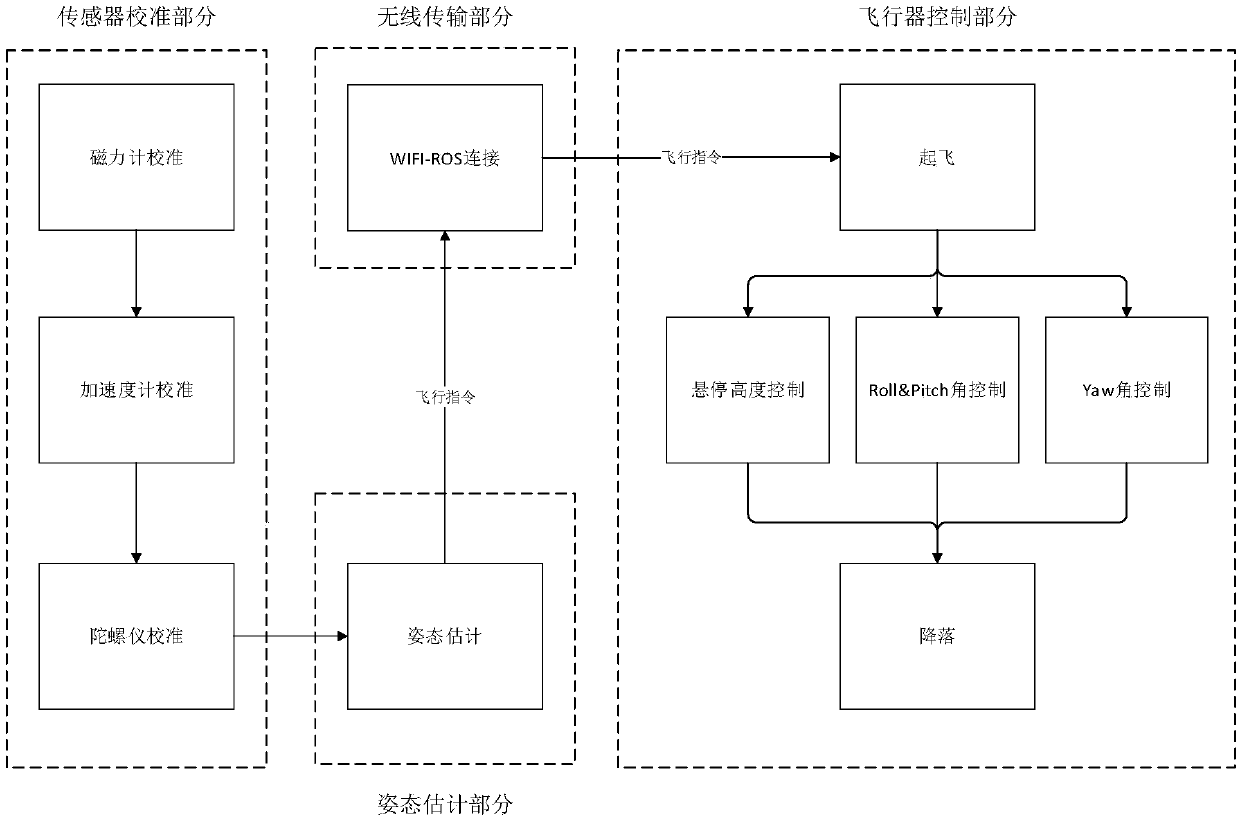
[0046] like figure 1 Shown, a kind of UAV mobile phone APP control method that supports ROS, comprises the following steps:
[0047] S1, sensor calibration;
[0048] S2, attitude estimation;
[0049] S3, wireless data transmission;
[0050] S4. Aircraft control.
[0051] like figure 1 As shown, a ROS-supporting UAV mobile phone APP control method provided by the present invention is mainly divided into four parts: sensor calibration part, attitude estimation part, wireless transmission part and aircraft control part. The sensor calibration part mainly includes magnetometer calibration, accelerometer calibration and gyroscope calibration; the attitude estimation part is mainly used to estimate the attitude of the smartphone; the wireless transmission part is mainly used to transmit flight instructions between the mobile phone and the UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com