Parameterized control method for automotive active suspension system
A technology of active suspension and control method, which is applied in the direction of suspension, elastic suspension, vehicle components, etc., and can solve the problems of single control target and inability to dynamically adjust the control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0148] In this embodiment, the parameters of the 1 / 2 vehicle active suspension system model are shown in Table 1 below:
[0149]
[0150] Table 1
[0151]In order to test the effect of the parameterized robust controller, the system parameters of the system are set as: γ=1, h=0.5. Then the parameter value of the parameterized robust controller is: b 7 =-5000,c 8 =-5000, b 8 =-500.
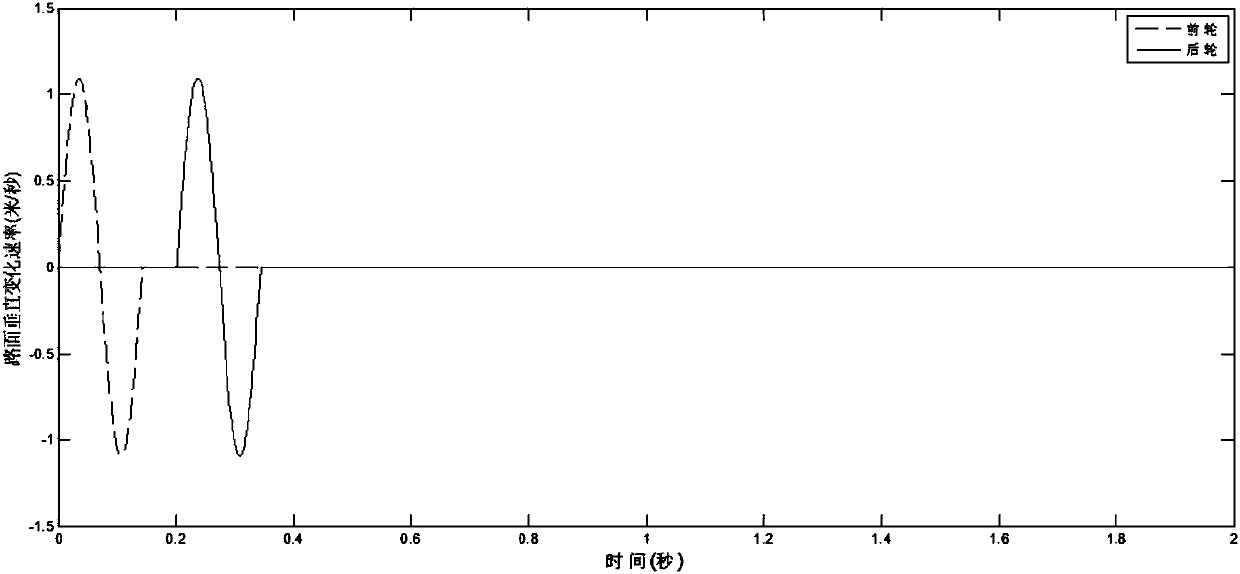
[0152] Specifically, for example, image 3 Indicates that during the driving process of the vehicle, the main road disturbance is a lumpy road disturbance, and its mathematical description is:
[0153]
[0154] Wherein, A and L are respectively the height and length of the road surface input, assuming A=0.05m, L=2m, then the driving speed of the car is V=50 (km / h).
[0155] Figure 4 expressed in image 3 The schematic diagram of the control force given by the parameterized robust controller under the block road disturbance. Depend on Figure 4 It can be seen that under such a contr...
Embodiment 2
[0158] In this embodiment, the difference from Embodiment 1 is: the load of the vehicle body has increased the vehicle body m s When the measured weight of the vehicle body changes, the parameters of the corresponding controller will change to meet the control requirements for the stability of the vehicle body, and other contents will not be repeated.
Embodiment 3
[0160] The difference between this embodiment and the first embodiment is that when the vehicle speed V changes, the parameters of the corresponding controller will change to meet the control requirements for the stability of the vehicle body, and other details will not be repeated here.
[0161] To sum up, according to the parameterized control method of the automobile active suspension system in the embodiment of the present invention, one-half of the automobile model is selected as the research object, and the dynamic situation of the spring and damping is considered, so as to achieve the purpose of precise control of automobile driving; considering Without modeling and external uncertain disturbances, a cluster of parameterized controllers is designed to stabilize the car while improving ride comfort and driving comfort to achieve the purpose of multi-objective control; through the designed adjustable parameters, according to the weight of the car body , driving speed, road...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com