A kind of unmanned aerial vehicle autonomous navigation method and system
A technology for autonomous navigation and drones, applied in control/adjustment systems, 3D position/channel control, instruments, etc., to solve problems such as failure to complete advance teaching tasks, failure, and inability to perceive drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
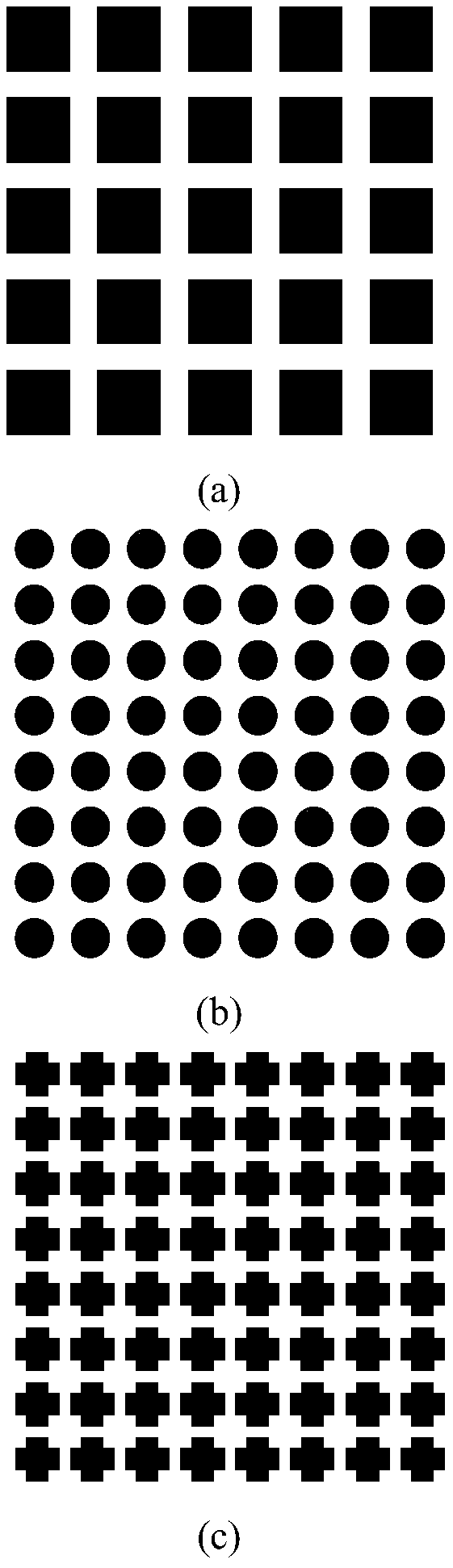
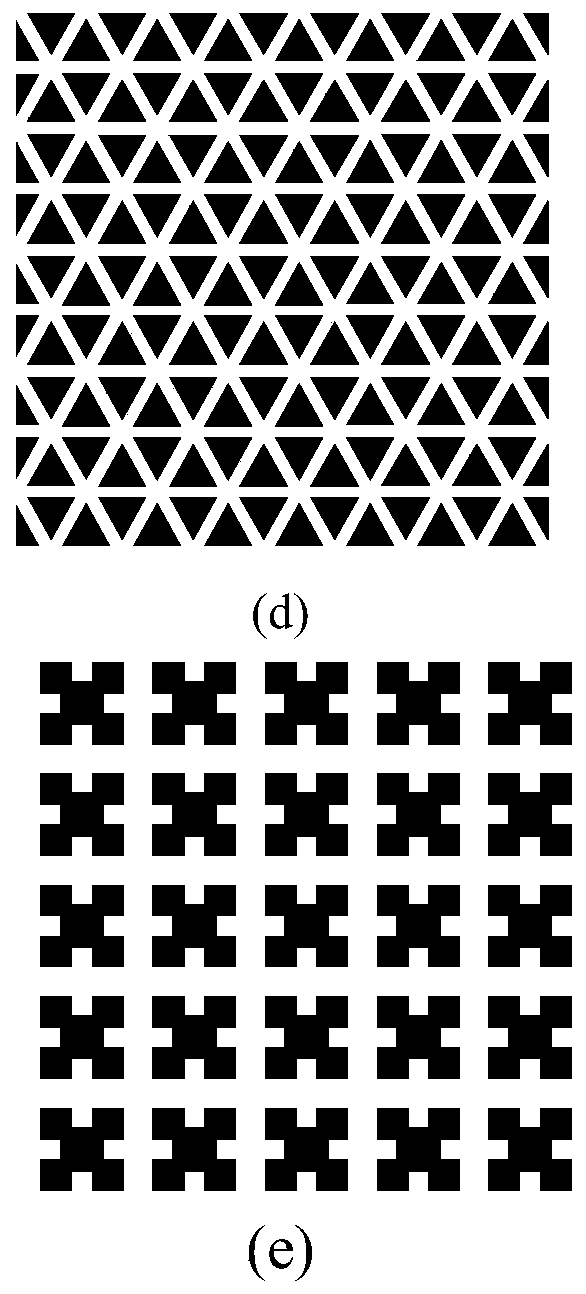
[0099] This embodiment uses simulation means to verify the effectiveness of the method and system provided by the present invention. In order to reduce the complexity of the problem without losing generality, a virtual drone is generated through simulation, and it is assumed that the flying height and speed of the drone are constant, and only the direction of the drone needs to be controlled. Given that the flying height of the UAV is constant, the following results are generated through simulation: figure 1 (a)~ figure 1 (e) shows five kinds of virtual two-dimensional complex environments, and each virtual environment covers an area of one square kilometer.
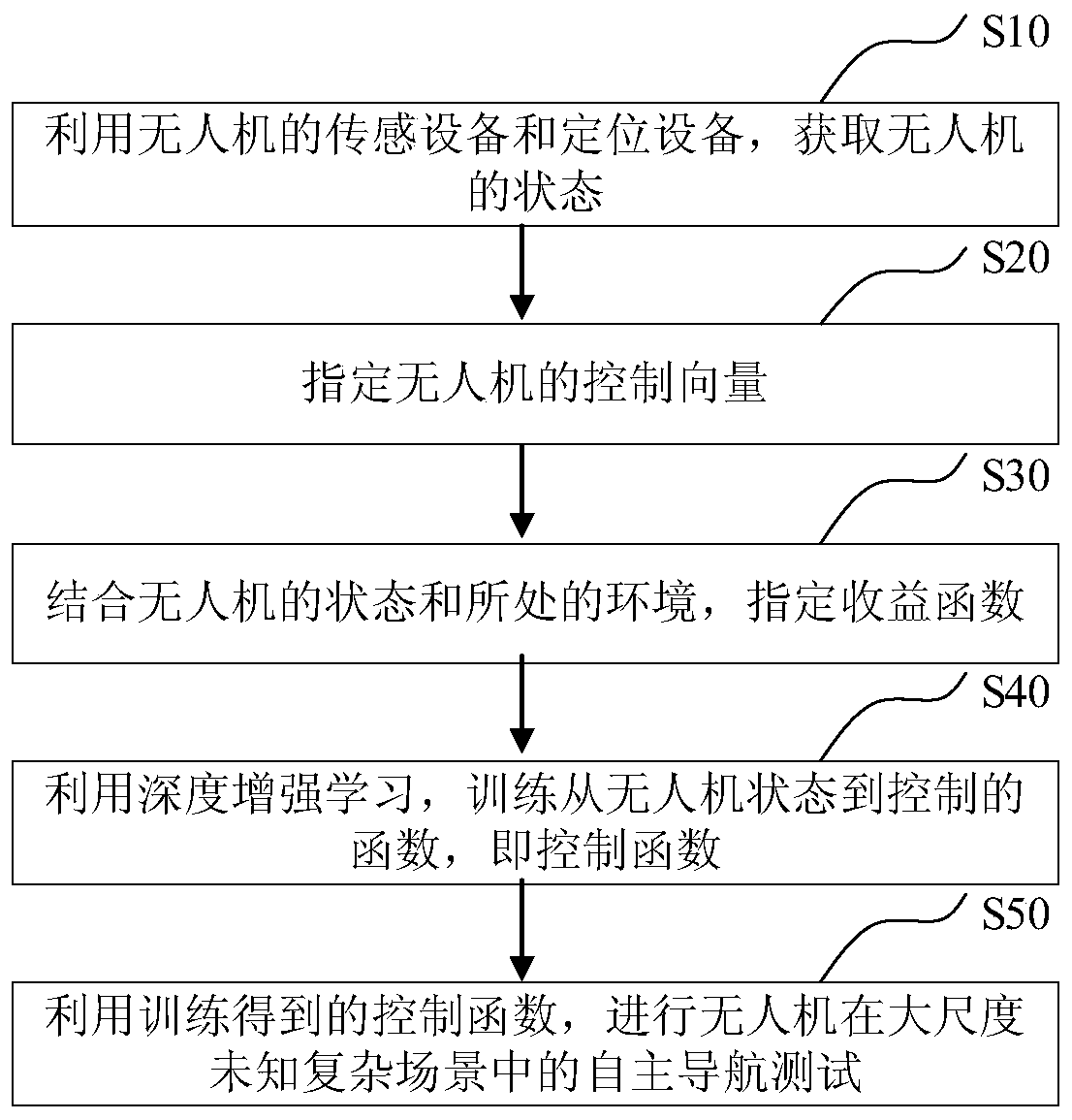
[0100] figure 2 It is a flow chart of the autonomous navigation method of the UAV in the large-scale unknown complex environment in the embodiment of the present invention. Combine below figure 2 Each step and its principle are explained in detail.
[0101] Step S10, using the sensing device and the positioning ...
Embodiment 2
[0171] Based on the same inventive concept, an embodiment of the present invention also provides an autonomous navigation system for a UAV in a large-scale unknown complex environment. Such as Figure 9 As shown, the autonomous navigation system 10 includes:
[0172] State obtaining module 100, for obtaining the state of unmanned aerial vehicle;
[0173] The control vector module 200 is used to determine the control vector of the unmanned aerial vehicle;
[0174] A revenue function module 300, which is connected to the state acquisition module, is used to determine the revenue function according to the state of the drone and the environment in which the drone is located;
[0175] Function training module 400, it connects described state acquisition module, control vector module and revenue specifying module, is used for carrying out depth reinforcement learning based on revenue function, training unmanned aerial vehicle from state mapping to the control function of control; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com