Unmanned aerial vehicle trajectory planning method based on EB-RRT
A technology of EB-RRT and track planning, applied in navigation calculation tools, three-dimensional position/course control, complex mathematical operations, etc., can solve problems such as poor practicability, low operating efficiency, and slow convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings.
[0048] The present invention will be further described below in conjunction with the accompanying drawings.
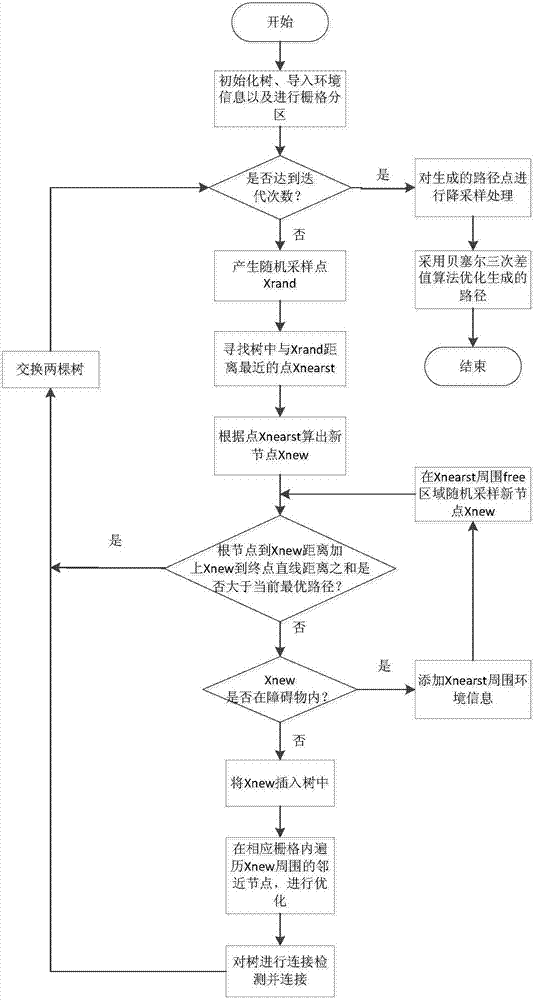
[0049] refer to figure 1 , a UAV track planning method based on EB-RRT, including the following steps:
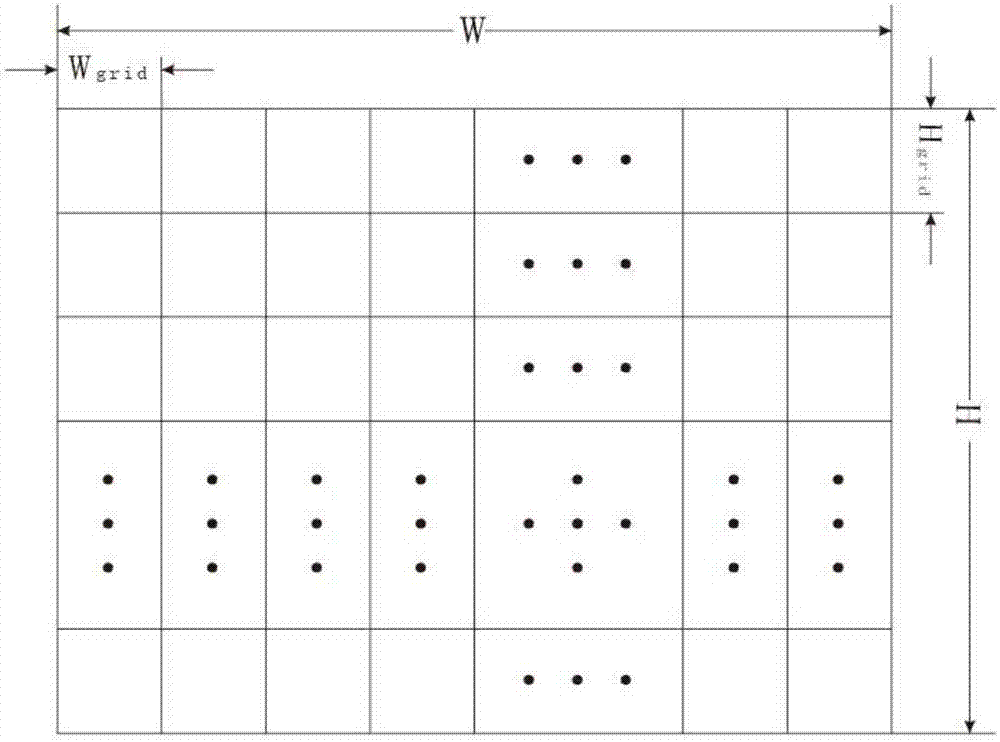
[0050] Step1: Import environmental information, and perform grid partition processing on the map environment, in preparation for the subsequent search for nearby node sets.
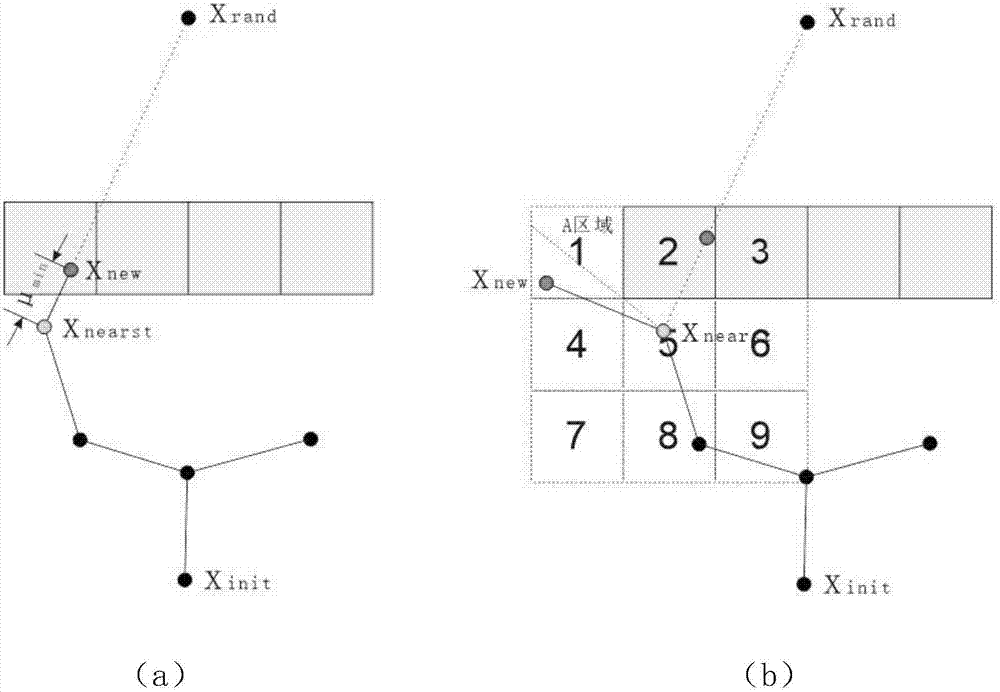
[0051] Step2: Generate a random point x rand , find the node x closest to the random point among the existing nodes nearst .
[0052] Step3: Calculate the insertion point x according to the step size new . If the root node to x new distance from x new If the sum of the Euclidean distances to the end point is greater than the length of the current optimal path, skip this iteration; otherwise, enter Step4.
[0053] Step4: to x new Whether the point is detected within the obstacl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com