Single robotic fish behavioral control strategy based on three-dimensional fuzzy PTP algorithm
A control strategy, the technology of robotic fish, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as difficult to achieve, complex turning strategy, etc., to achieve a wide range of applications, fast data update speed, sports performance improved effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
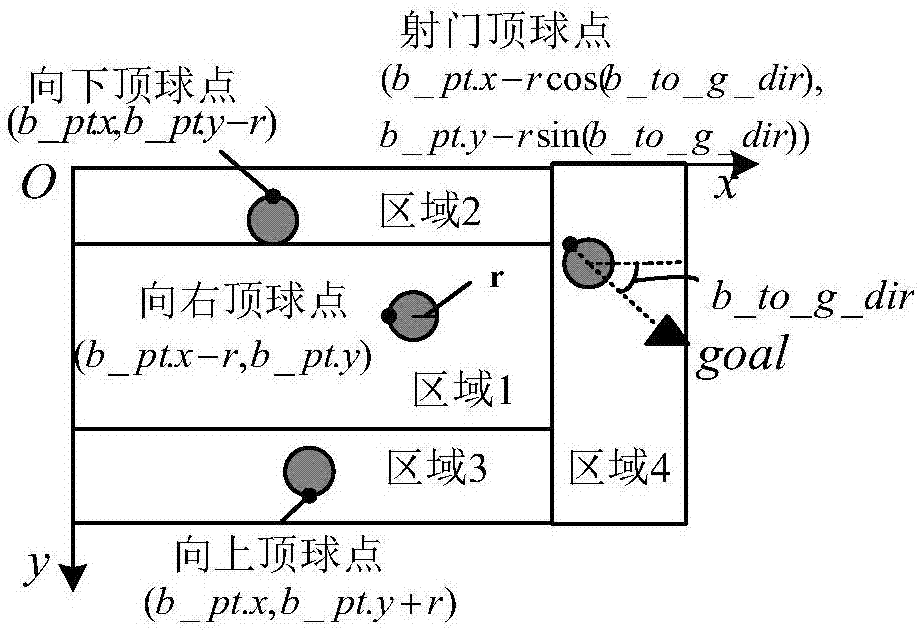
[0073] This embodiment describes the division of different pool areas and the setting of heading points in corresponding areas during the specific implementation of the present invention. figure 1 It is a single robot fish behavior control strategy based on the three-dimensional fuzzy PTP algorithm of the present invention. In step 1, different pool areas are divided and corresponding area heading points are set. figure 1 Among them, Oxy is a rectangular coordinate system.
[0074] From figure 1 It can be seen from the figure that the pool area is divided into Area 1, Area 2, Area 3, and Area 4; each area has a ball, and a black dot on the ball is the top ball point. The top points set in different areas The ball point coordinates, area 1 contains the rightward heading point, and its coordinates are (b_pt.x-r, b_pt.y); area 2 contains the downward heading point, and its coordinates are (b_pt.x, b_pt.y-r); Area 3 contains the upward heading point, whose coordinates are (b_pt....
Embodiment 2
[0076] This embodiment describes in detail the overall flow of a single robot fish behavior control strategy based on the three-dimensional fuzzy PTP algorithm.
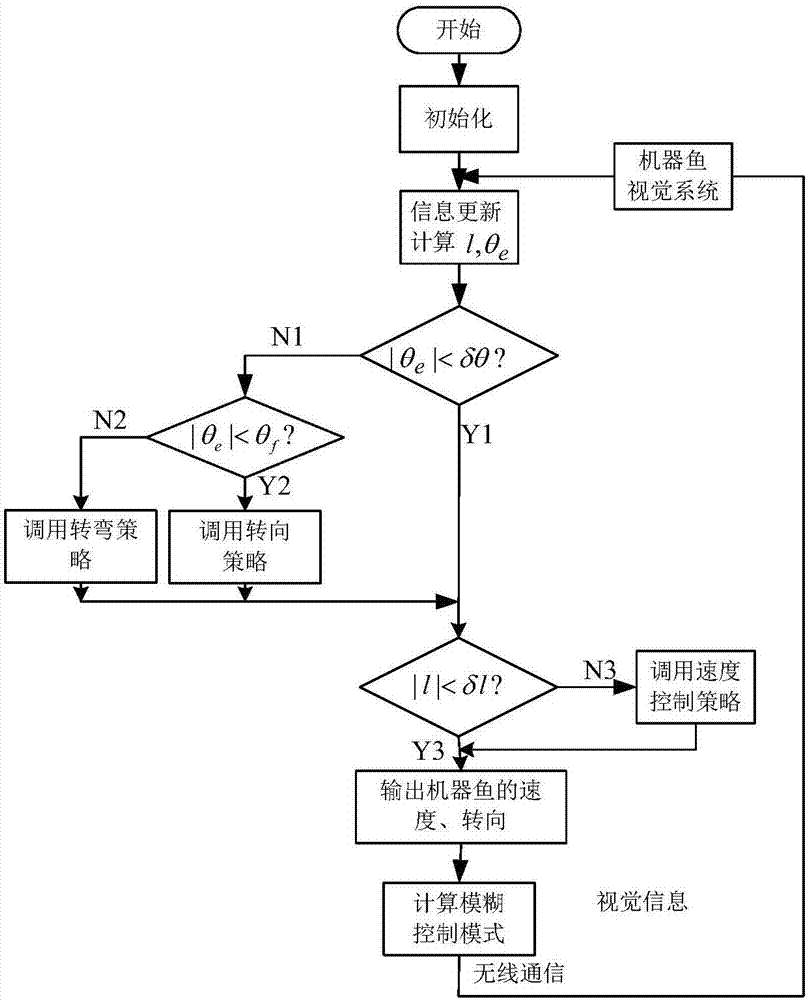
[0077] figure 2 It is a PTP algorithm design flow chart under the three-dimensional fuzzy strategy of a single robot fish behavior control strategy based on the three-dimensional fuzzy PTP algorithm of the present invention.
[0078] From figure 2 It can be seen that the specific implementation of the present invention comprises the following steps:
[0079] Step A. Initialization;
[0080] Initialize the sampling time to 1s; such as figure 1 As shown, the pool area is divided into 4 areas; the coordinates of the ball are (103cm, 47cm), located in area 1, and the coordinates of the point point are (101cm, 47cm);
[0081] Step B. Information update calculation;
[0082] Among them, the information update parameters are l and θ e ;
[0083] Step C. Determine whether |θ e |<δθ, and perform corresponding operat...
Embodiment 3
[0098] This embodiment elaborates in detail that when the present invention is implemented, the corresponding robot fish heading behavior planning strategies are set for different regions, specifically corresponding to the robot fish heading behavior planning in step 5.1 of the strategy proposed in the present invention.
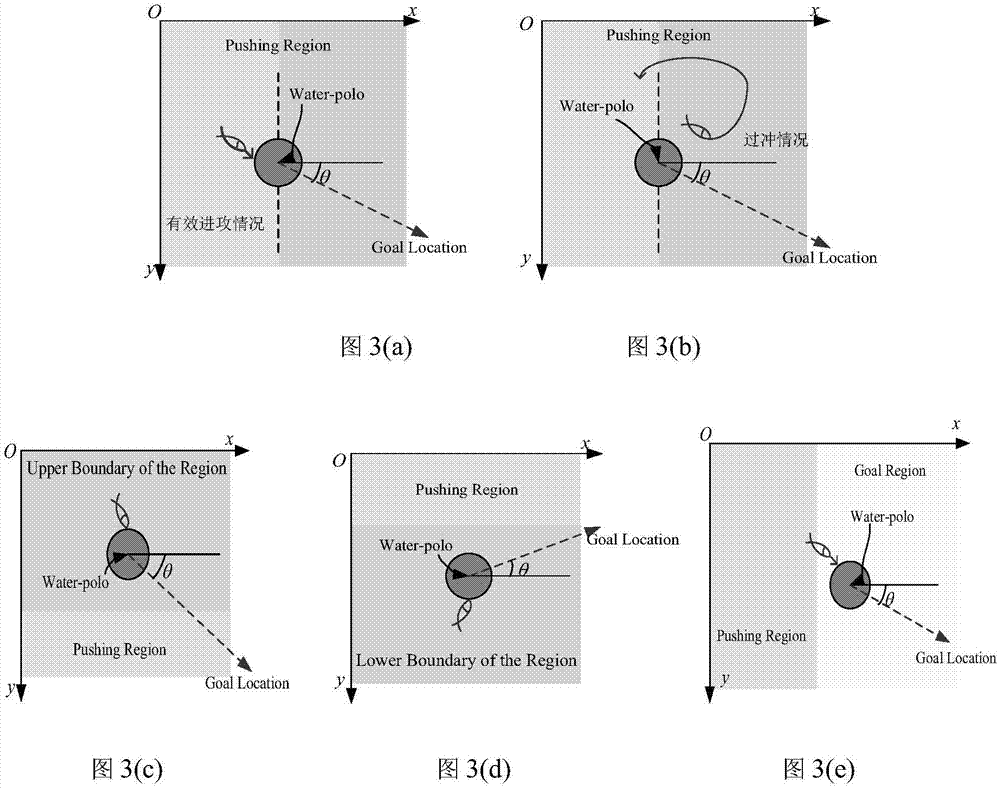
[0099] The goal of the ball-heading behavior planning is to plan the appropriate movement behavior for the robot fish to guide the robot fish to head the ball to the target point. Corresponding to various regional conditions, the corresponding behavior design makes the robot fish choose the corresponding behavior to move to the target point in different regions. The specific process is as follows:
[0100] 1) BPR behavior: corresponds to the behavior of the offensive zone. Effective offensive situation: if image 3 As shown in (a), when the abscissa of the robot fish center coordinate f_CenterPt is smaller than the abscissa of the water polo coordinate b_pt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com