Intelligent cleaning device and grid path working method thereof
A cleaning device and intelligent technology, applied in the field of intelligent robots, can solve problems such as inability to clean, no wire path planning, and collision and loss of sweeping robots, so as to improve cleaning efficiency and coverage, avoid incomplete cleaning, and enhance product applicability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0086] Embodiment 1: refer to attached Figure 7 , 8 , when the intelligent cleaning device does the first bow cleaning and the second bow cleaning, when there are obstacles in the plane of the work space, if only the left wall inspection or the right wall inspection detects obstacles, the intelligent cleaning device will move along the original direction. Sweep along the wall, see attached Figure 8 . When the intelligent cleaning device cleans along the wall and the wall detection module (including left wall inspection, middle wall inspection, and right wall inspection) cannot detect obstacles, the intelligent cleaning device continues to sweep along the original direction.
[0087] When obstacles are detected by the left wall inspection, middle wall inspection, and right wall inspection, and the relative displacement on the X axis after turning is less than S, start cleaning along the wall. When the gyroscope module detects that the Xn-1 of the intelligent cleaning devic...
Embodiment 2
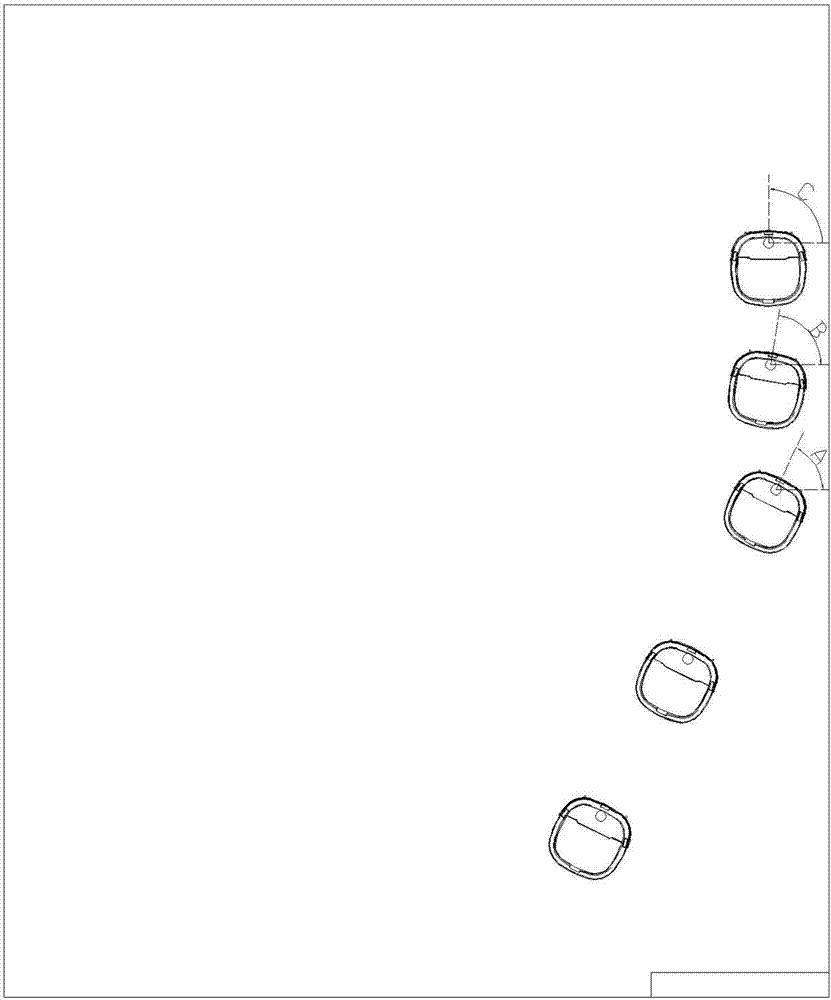
[0091] Embodiment 2: refer to attached Figure 9 , when the left wall inspection, the middle wall inspection, and the right wall inspection all detect obstacles, and the relative displacement on the X-axis after turning is less than 0.15m, start cleaning along the wall. When cleaning along the wall, the relative displacement on the X-axis is equal to 0.15m When m, restore bow cleaning;
[0092] When the left wall inspection, middle wall inspection, and right wall inspection all detect obstacles, and their relative displacement on the X-axis after turning is less than 0.15m, start cleaning along the wall, and the gyroscope module detects that the intelligent cleaning device is at the X-axis coordinate When the point Xn-1 is less than Xn, end the first bow cleaning and continue cleaning along the wall.
[0093] When the intelligent cleaning device performs bow-shaped cleaning for the second time, obstacles are detected by the left wall inspection, middle wall inspection, and ri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com