A Method of Inertial/GPS Integrated Navigation Based on Dual Quaternion
A dual quaternion, combined navigation technology, applied in navigation, navigation through velocity/acceleration measurement, mapping and navigation, etc., can solve the problems of reduced filtering accuracy, longer convergence time, divergence, etc., to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
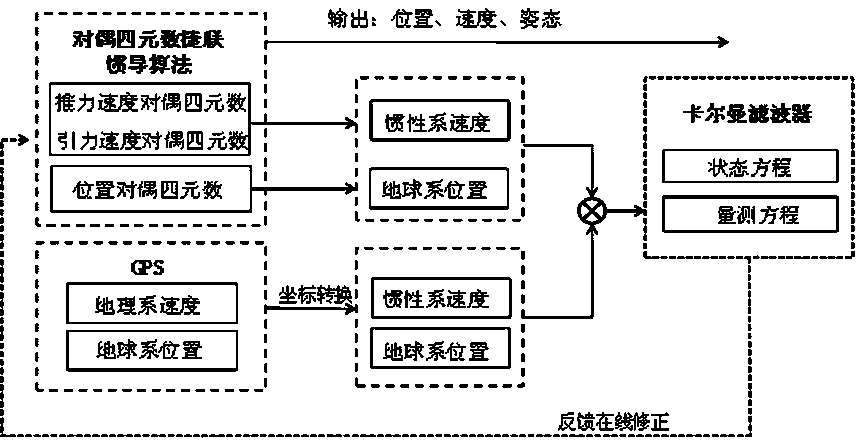
Method used
Image


Examples
specific Embodiment approach
[0070] 1. Establish gyro and accelerometer error models
[0071] Gyro error includes constant drift error, first-order Markov process random noise and white noise error. Accelerometer error is modeled as first-order Markov process random noise. The specific error model is as follows:
[0072]
[0073]
[0074] in, is the gyro error, ε b is the gyro constant value drift error, ε r is the first-order Markov process random noise of the gyroscope, ω g is white noise; δf B is the accelerometer error, is the first-order Markov process random noise of the accelerometer;
[0075] For the ε in the above formula b , ε r , After derivation, the following mathematical expressions can be obtained:
[0076]
[0077]
[0078]
[0079] in, for ε b The first derivative of ; for ε r The first derivative of ; for The first derivative of ; T g is the first-order Markov process correlation time of the gyroscope, ω r is the first-order Markov process driving w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com