Multi-legged robot energy margin calculation method considering external force impact interference and damping
A technology of multi-legged robots and energy margin, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve the problems of too few influencing factors and poor timeliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be further described below in conjunction with the accompanying drawings.
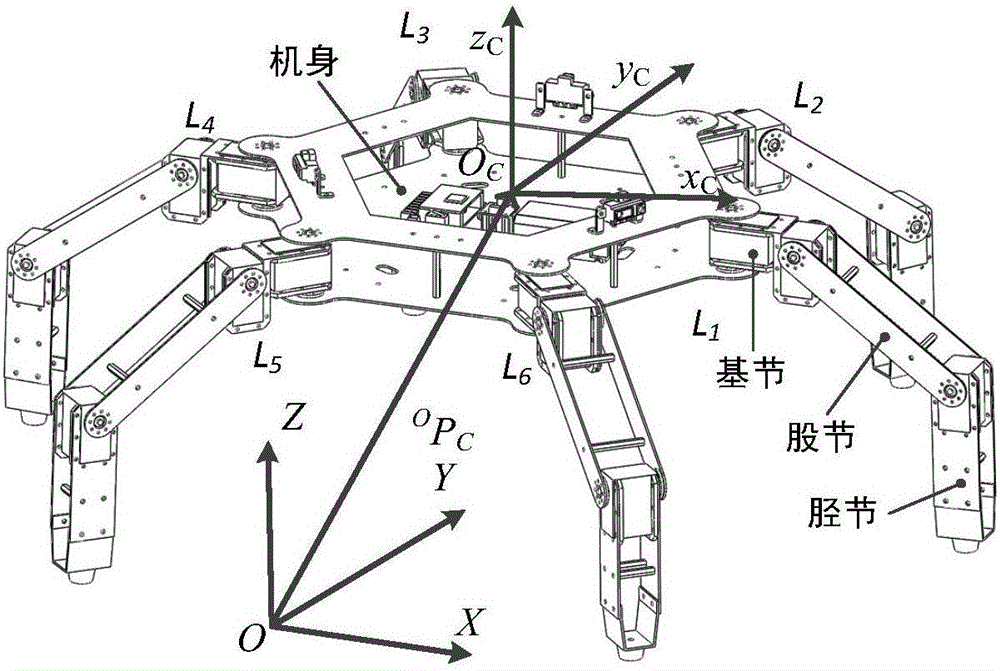
[0070] refer to Figure 1 to Figure 5 , a method for calculating the energy margin of a multi-legged robot considering external force impact interference and damping, taking a hexapod robot as an example, including a robot body and six mutually independent walking legs, the calculation method includes the following steps:
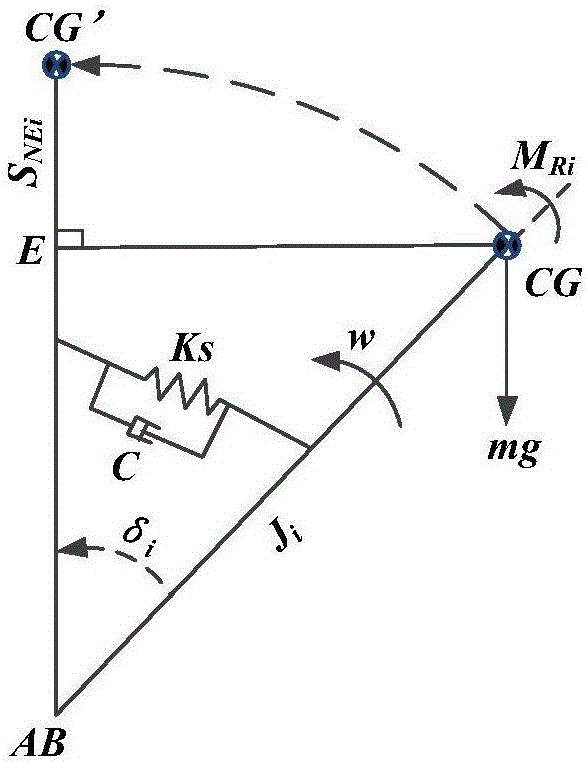
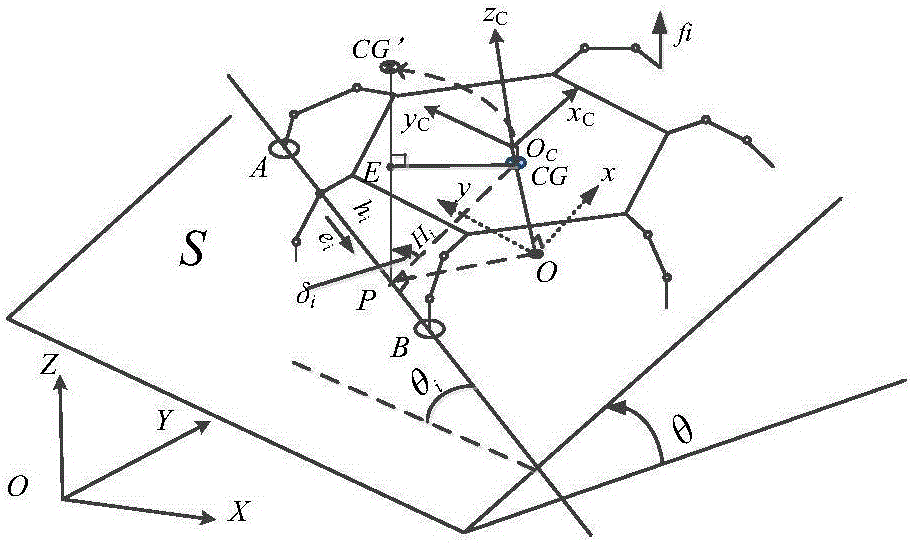
[0071] Step 1: Convert the overturning action of the robot into a mechanical rotation system including spring damping characteristics, and calculate the energy margin expression of the robot at this time;
[0072] 1.1) According to Newton's second law, the dynamic differential equation of the robot can be listed:
[0073]
[0074] Among them, the robot when flipping around the side line is regarded as a mechanical rotation system, and the system consists of a moment of inertia of J i , the torsional stiffness is K S and a damper with a viscous...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com