Ground-guided UAV flight and landing system and method based on LED dot matrix
An unmanned aerial vehicle and guided technology, applied to ground devices, control/regulation systems, aircraft parts, etc., can solve problems such as malfunction, difficulty, and complex image processing algorithms, so as to avoid loosening and improve fastening Sex, improve the effect of protection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0118] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
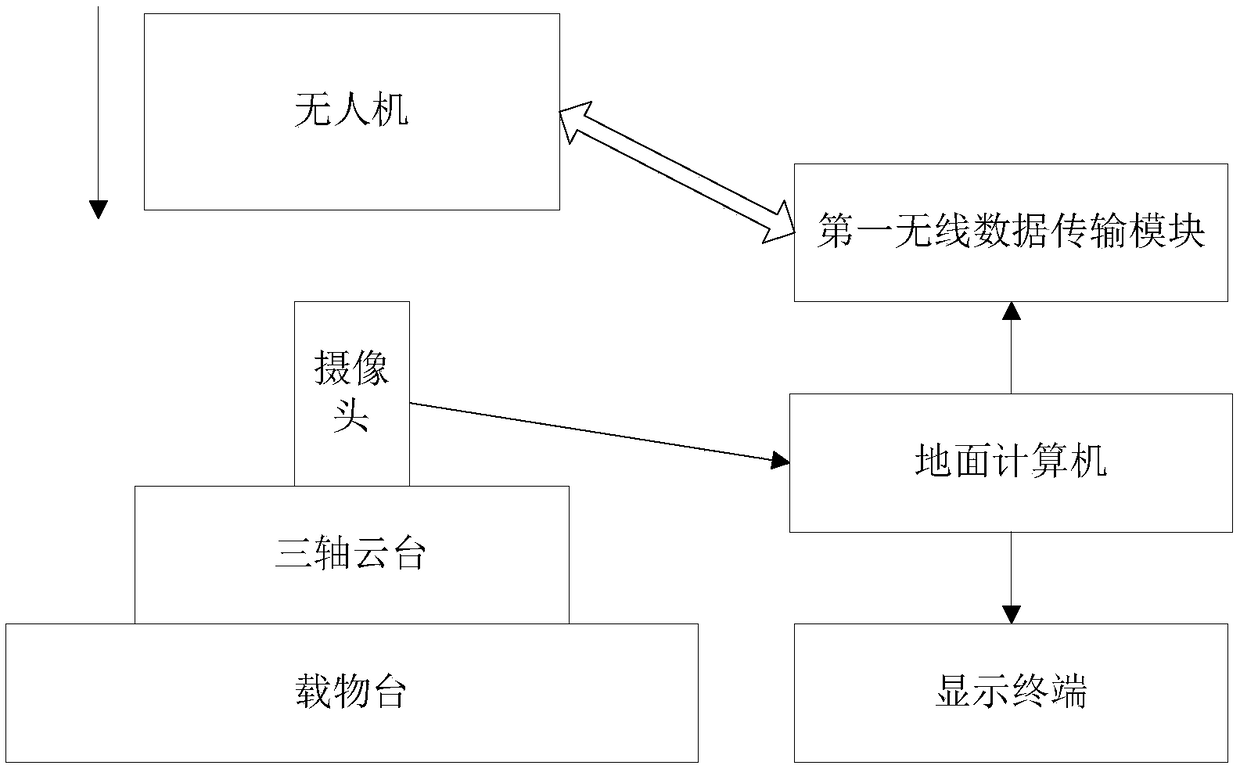
[0119] Such as figure 1As shown, the ground-guided UAV flight and landing system based on LED dot matrix includes: UAV and UAV landing station, and the UAV landing station includes a loading platform, and auxiliary equipment is installed on the loading platform. The precise positioning and fixing device for the landing of the drone, the precise positioning and fixing device for assisting the landing of the drone are installed with a three-axis pan-tilt, and a camera is installed on the three-axis pan-tilt, and the camera is always under the control of the pan-tilt Keeping the lens facing up and in the same direction, the camera is connected to the ground computer; the ground computer controls the camera to take pictures; the ground computer communicates with the UAV through the first wireless data transmission module; the computer also communicates with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com