Under-actuated flexible terminal actuator aiming at special-shaped melons and fruits and simulating bird jaws
An end effector and underactuated technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve problems such as complex manipulator motion control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the technical means, innovative points, and achieved effects of the present invention easy to understand, the present invention will be further described below in conjunction with the accompanying drawings.
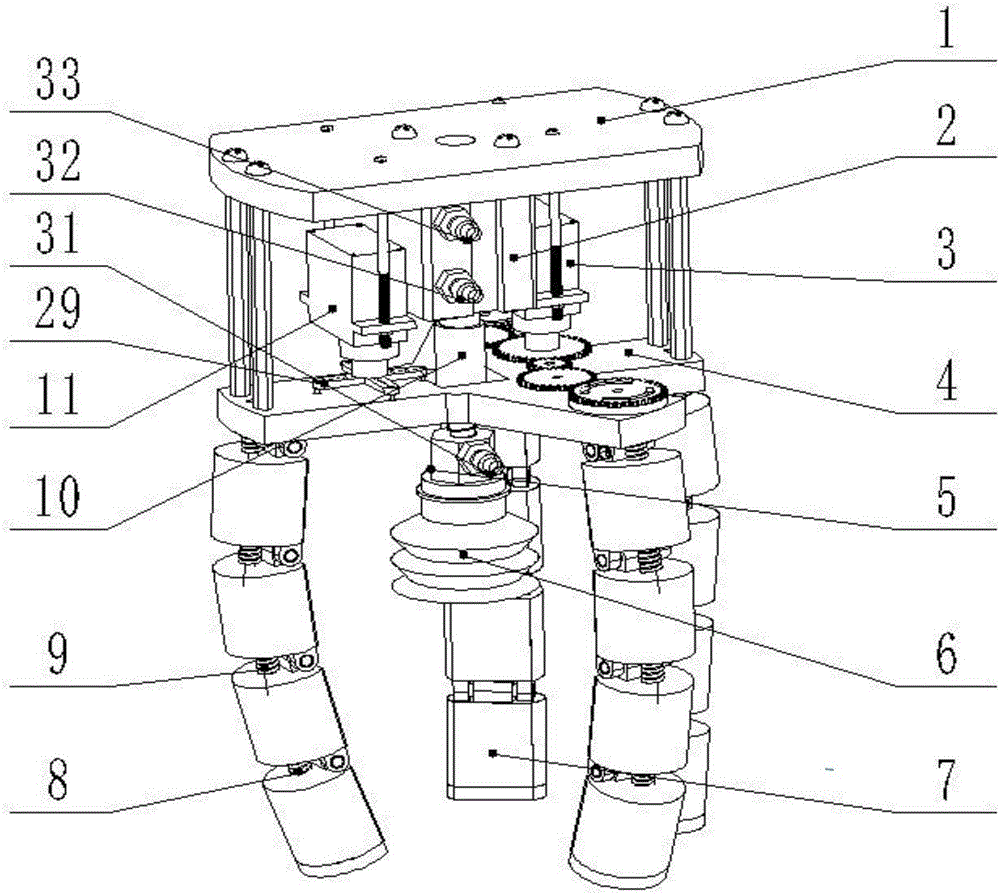
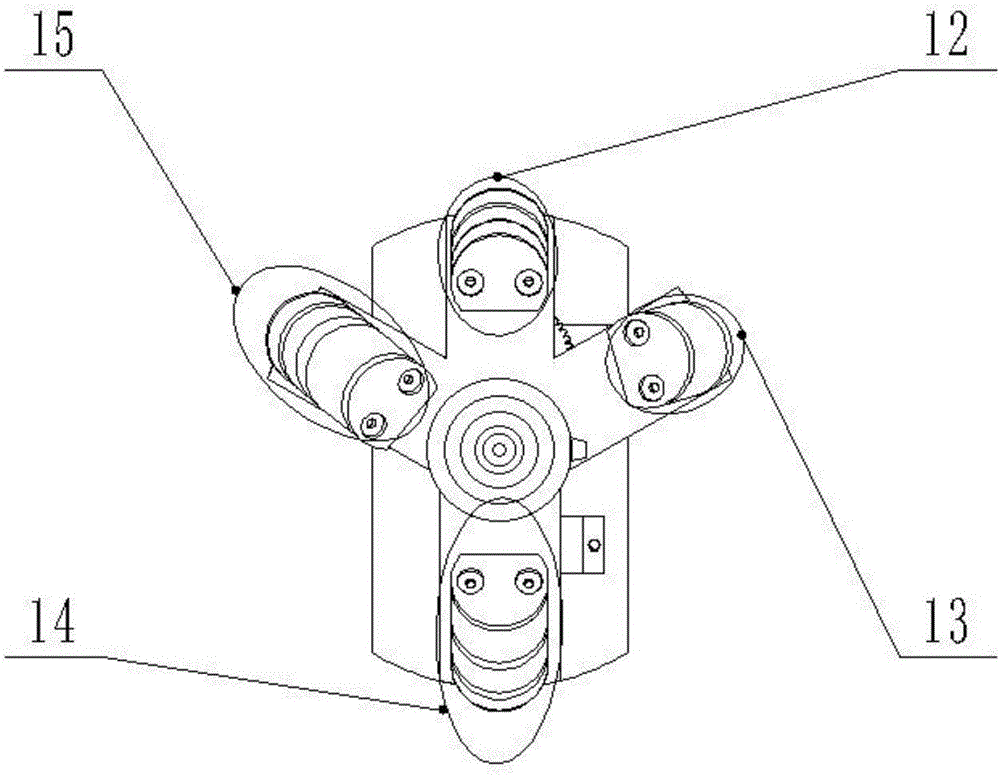
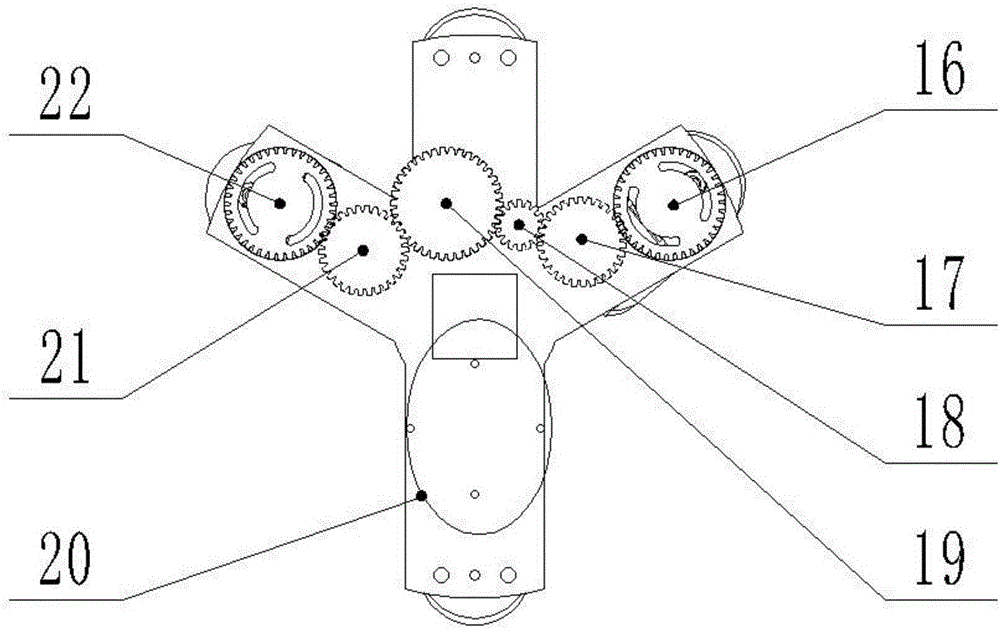
[0030] Such as figure 1 Shown, the present invention consists of a top plate (1), telescopic cylinder (2), chassis (4), vacuum silica gel sucker (6), sucker rod (5), two identical steering gears (3) (11), two base(23)(30), four identical flexible grabbing units(12)(13)(14)(15), six gears(16)(17)(18)(19)(21)(22 ) constitutes; the top joint (24) and the front joint (26), the front joint (26) and the middle joint of the flexible grasping unit (16) (17) (18) (19) (21) (22) (27), the middle joint (27) and the tail joint (28) are successively hinged in series through cylindrical pins (25), wherein the flexible grabbing units (12) and (14) are fixed on the chassis, and the flexible grabbing unit (13 ) and (15) are respectively fixed on the base (23) and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com