Offline robot programming device
A technology of programming devices and robots, which is applied in the direction of program control devices, instruments, manipulators, etc., and can solve problems such as time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
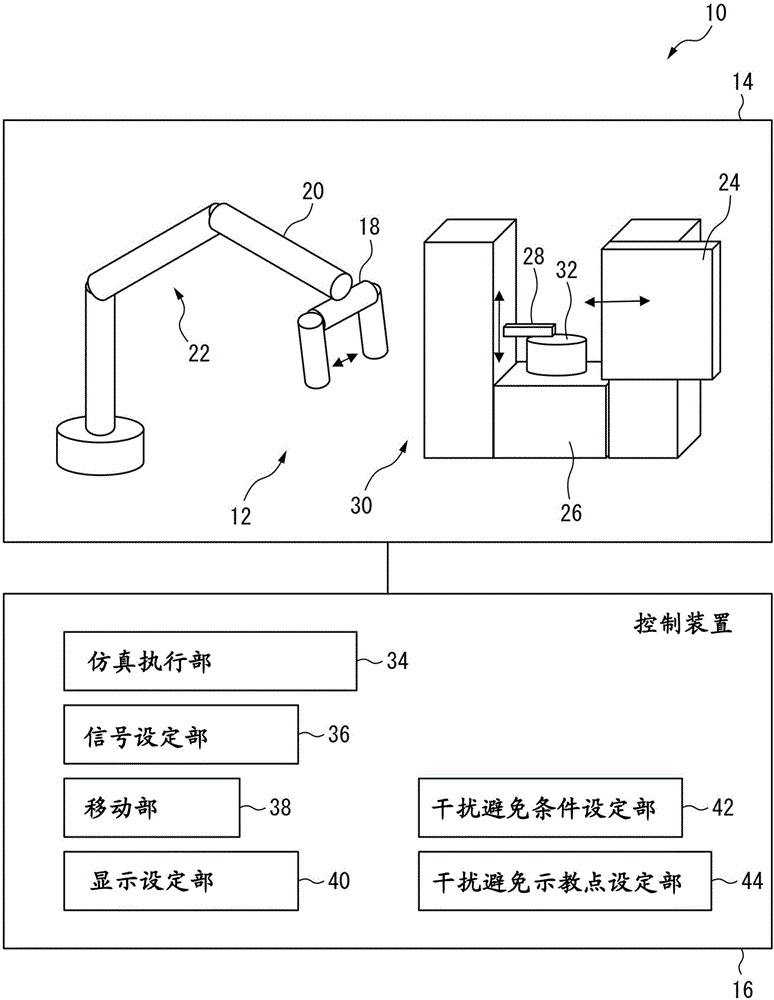
[0020] figure 1 It is a diagram showing a configuration example of a robot programming device (hereinafter also simply referred to as a programming device) 10 according to a preferred embodiment of the present invention. The programming device 10 has a display unit (display) 14 capable of displaying a three-dimensional model of the robot system 12 arranged in a three-dimensional virtual space, and a control device 16 having various functions described later. The robot system 12 includes: a robot 22 having a movable part (robot arm) 20 with an openable and closable manipulator 18 attached to the front end, an openable and closable door 24, a workbench 26, and a gripper with an openable and closable arm 18. The peripheral device (such as a machine tool) 30 of the robot 28 controls the manipulator 18, the door 24, and the gripper 28 through the I / O signal (control signal) of the robot 22.
[0021] The manipulator 18 is configured to enter into the interior of the machine tool 30...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com