Vehicle sensor information screening method and vehicle collision avoidance system using the method
A technology for vehicle collision avoidance and collision avoidance, which is applied to vehicle components, vehicle safety arrangements, control/regulation systems, etc. The effect of police
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
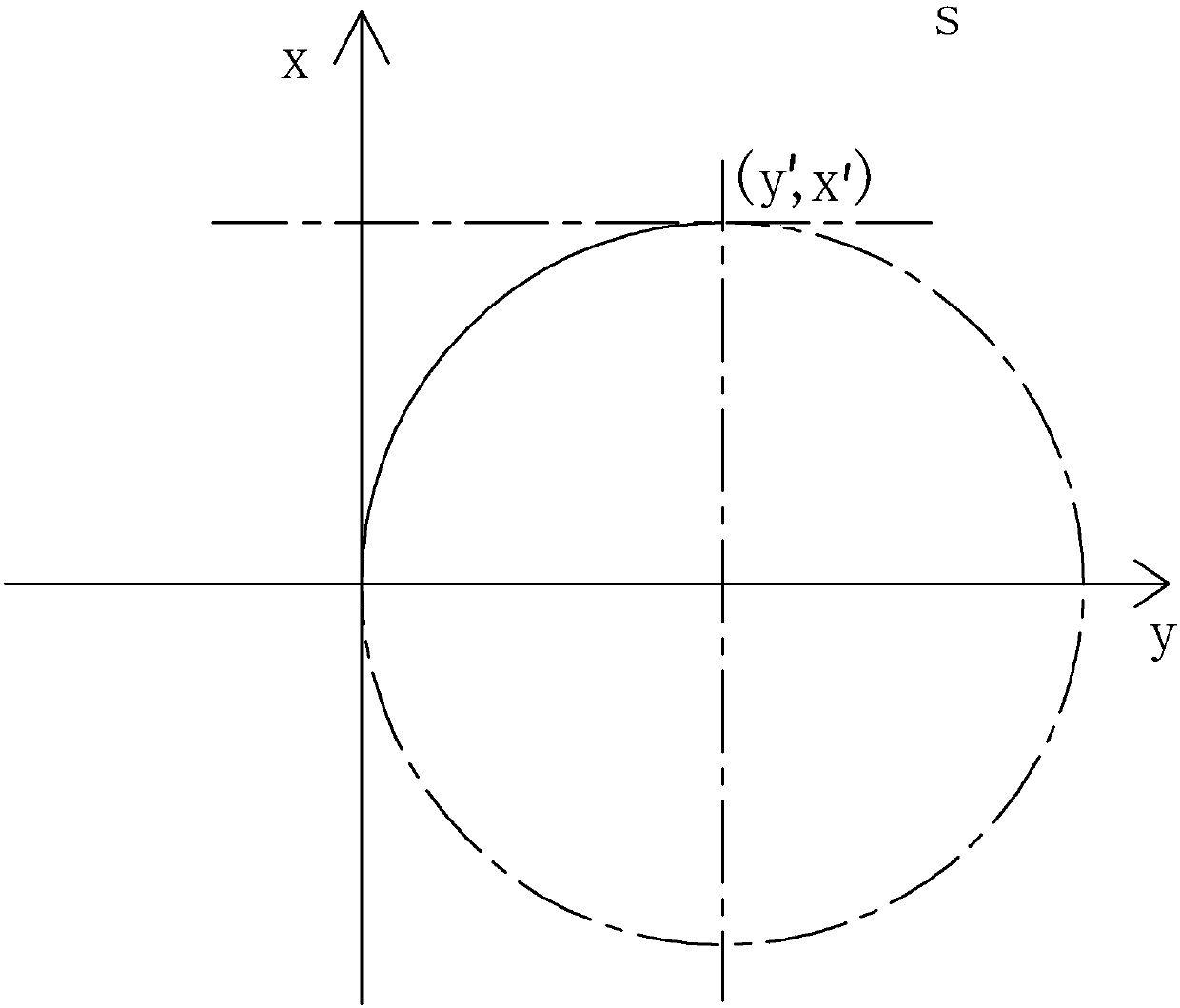
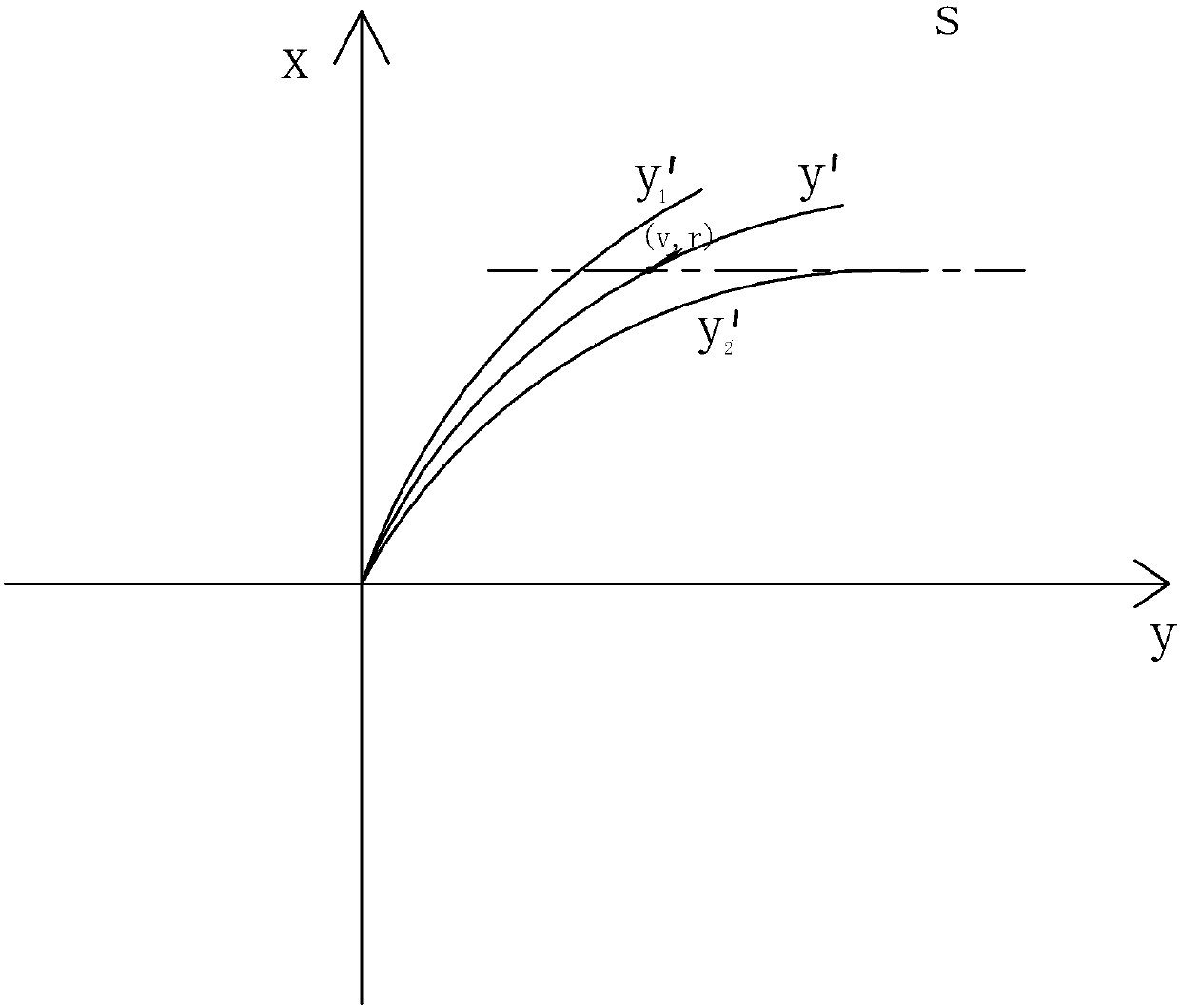
[0059] Embodiment 1, a method for screening vehicle-mounted sensor information, see the appended figure 1 , 2 , when the vehicle is moving, take the instantaneous position of the vehicle when turning as the origin and select the s area to establish a coordinate system. The horizontal axis is the vehicle lateral displacement y, the vertical axis is the vehicle longitudinal displacement x, and the position set A of all obstacles in the s area is obtained through the radar 1 (y,x). And in theory, it is possible to calculate the driving trajectory of the vehicle based on the instantaneous position. And the trajectory is a circle with a certain point (a, b) in the coordinate system as the center and the initial position of the vehicle, that is, the origin (0,0) as the starting point. According to the formula, the trajectory function (y-a)²+(x-b)²=r² of the circle in the coordinate system can be obtained, and r is the radius of the circle. In order to obtain the coordinates (a, ...
Embodiment 2
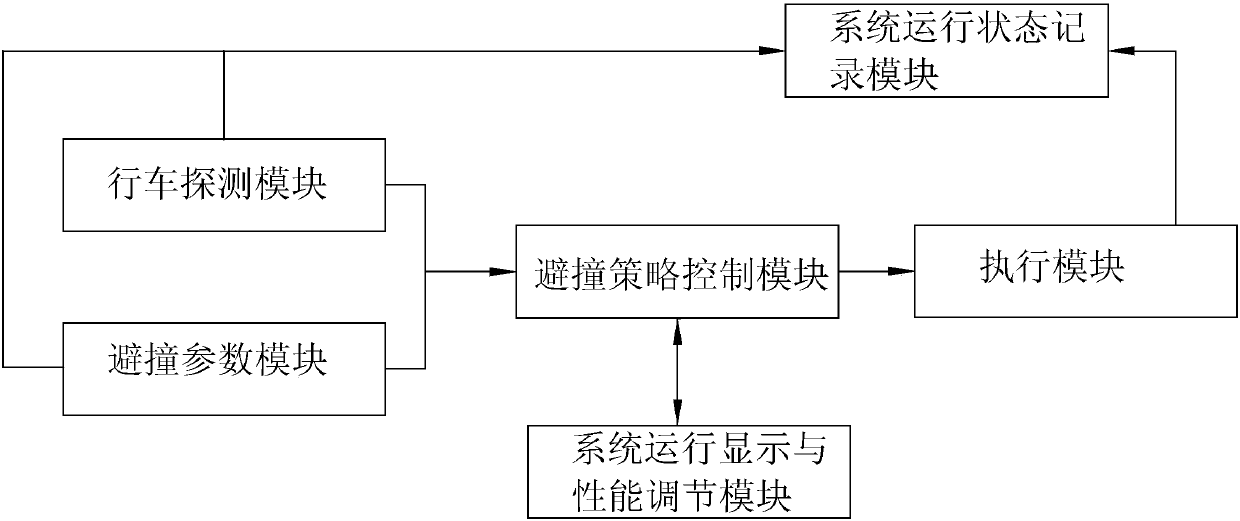
[0062] Embodiment 2, a kind of vehicle collision avoidance system, such as Figure 4 As shown, the driving detection module is composed of a millimeter-wave radar sensor, an ultrasonic sensor, an image recognition sensor, a gyroscope module, the vehicle speed information and the target screening algorithm in Embodiment 1. The target screening process uses information fusion algorithm to screen all the target information obtained by the first three sensors at a certain angle in the forward direction of the car, to solve the problem of high false alarm rate caused by a single sensor, and introduce the vehicle The vehicle speed and the yaw angle rate obtained by the gyroscope module, combined with the vehicle speed and the longitudinal offset become the vehicle's expected driving trajectory, so that the real threat to the vehicle's expected driving trajectory can be realized in all targets within the forward detection angle. The extraction of the target further transmits the rela...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com