A Multi-track Planning Method for UAV Based on Sequential Niche Particle Swarm Optimization Algorithm
A particle swarm algorithm and track planning technology, applied in three-dimensional position/course control, etc., can solve problems such as poor timeliness and large amount of calculation, and achieve the effect of controlling calculation time, meeting flight performance constraints, and reasonably avoiding threats
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to better illustrate the purpose and advantages of the present invention, the present invention will be further described below through the multi-track planning example of the unmanned aerial vehicle, in conjunction with the accompanying drawings and tables, and through the multi-track planning method combined with the standard niche and the particle swarm algorithm The results are compared, and the comprehensive performance of the present invention is verified and analyzed.
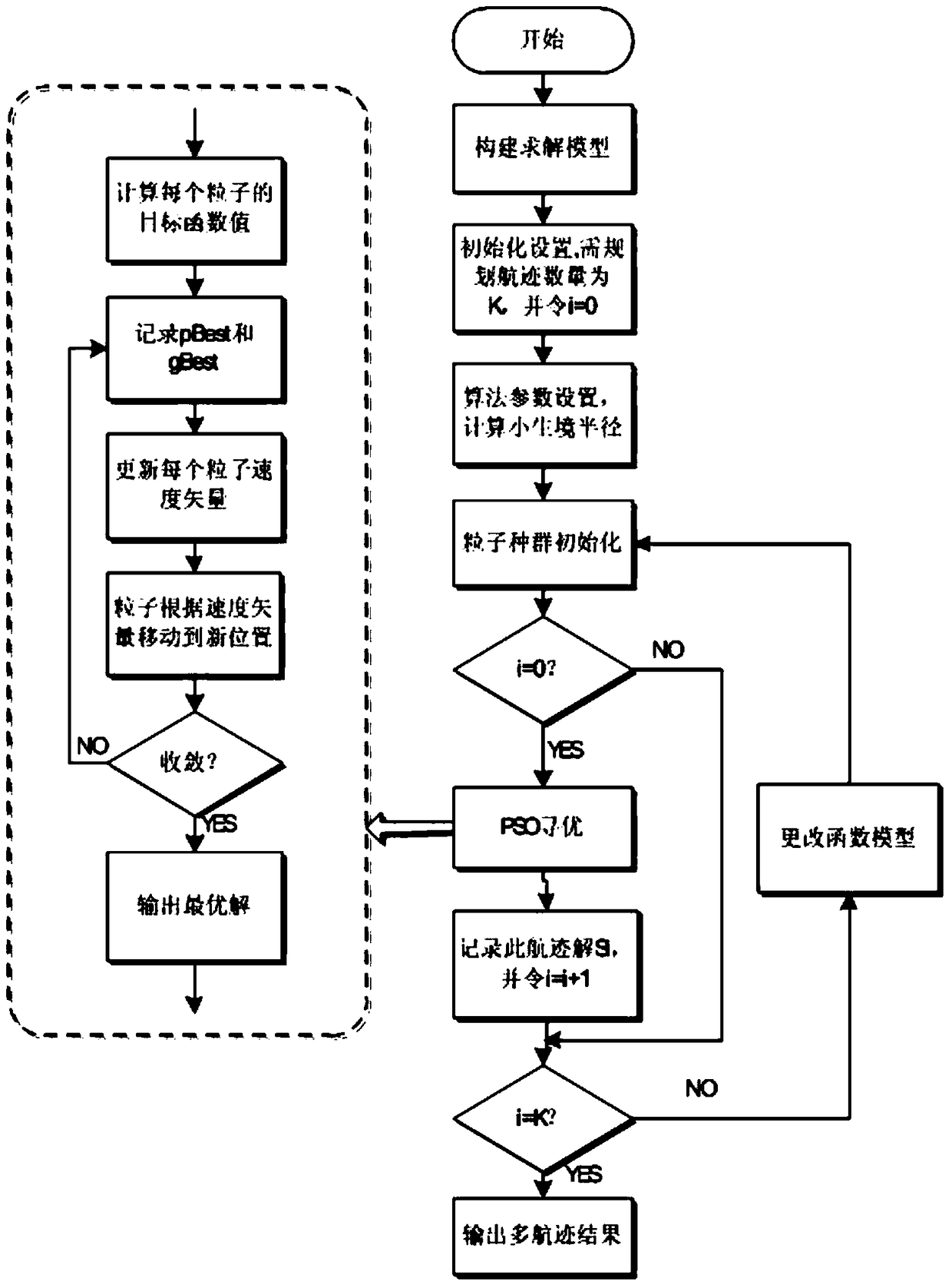
[0051] A multi-track planning method for unmanned aerial vehicles based on the sequence niche particle swarm algorithm, the steps are as follows figure 1 Shown:
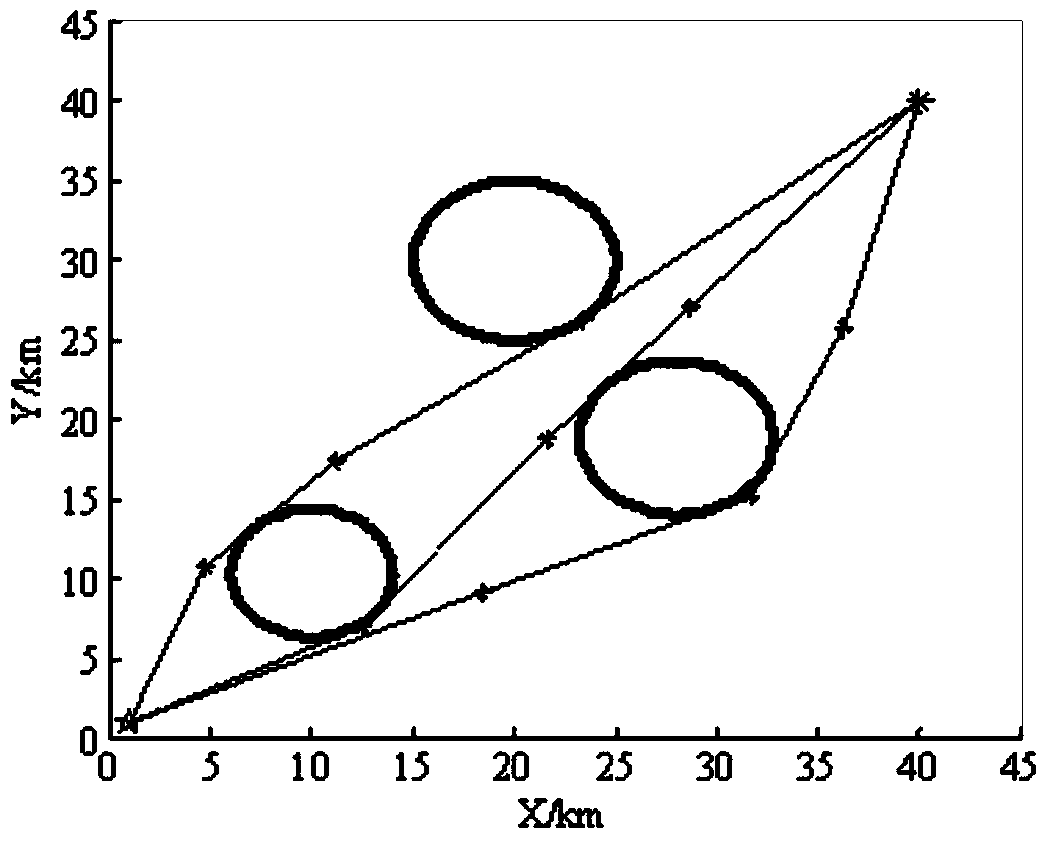
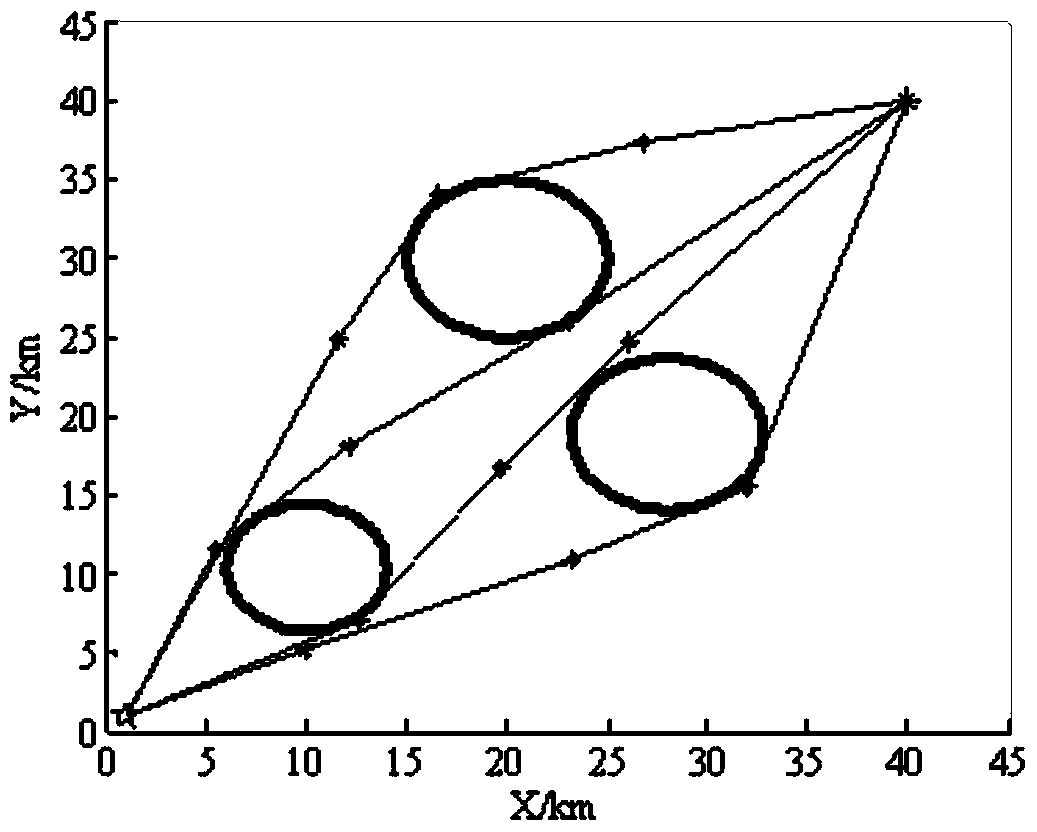
[0052] Step 1 Obtain the drone flight environment settings. These include the planned starting point and target point, the size of the flight area, the location and size of the threat, and the maximum turning angle of the aircraft θ max and the shortest track segment length l min .
[0053] In this example, the flight area i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com