A kind of robot charging method and its charging system
A charging system and charging method technology, applied in two-dimensional position/channel control and other directions, can solve the problems of mutual constraints between robot search efficiency and positioning equipment cost, and achieve the effect of low cost, simple method, and guaranteed efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0054] see Figure 4 ,
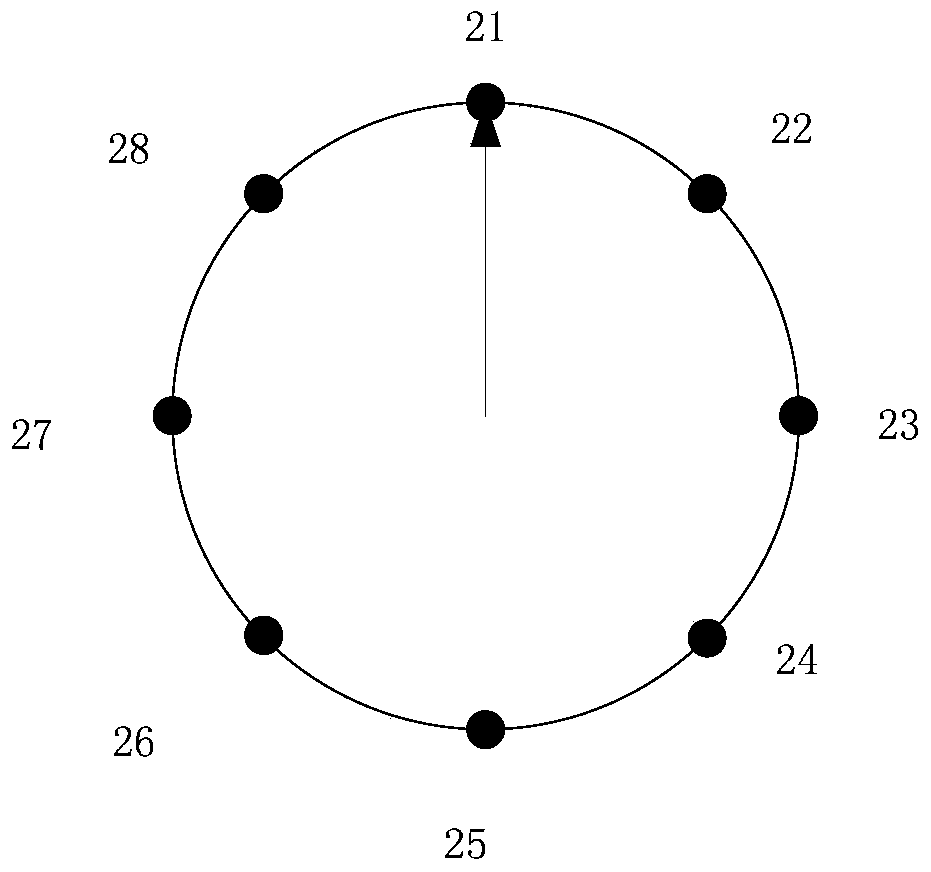
[0055] The robot body 10 is randomly placed on any angle Figure 4 Start the robot at a certain position, the coordinates received by the infrared receiver 22 are (SX4, SY2), and the coordinates received by the infrared receiver 8 are (SX5, SY1). The coordinates of these two points show that the robot is located in the south bedroom area. The abscissa signals X4 and X5 received by the infrared receivers 22 and 28 respectively indicate that the robot is located near the window sill area 200 in the south bedroom. The different abscissa coordinates indicate that the robot is heading north ; The Y2 and Y1 signals are received by the ordinate, indicating that the robot is located on the left side of the south bedroom, and the receiver 1 between them does not receive the coordinate signal, indicating that the robot is moving towards the west. After the vector synthesis of the two coordinates, it can be roughly known that the information is: the robot is cu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com