Target tracking method, device and system
A target tracking and target technology, which is applied in the field of devices and systems, and target tracking methods, can solve the problems of complex composition, unfavorable for the integration of UAV airborne systems, and low positioning and tracking accuracy of target tracking systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0086] In order to improve the positioning accuracy, GNSS (Global Navigation Satellite System, Global Positioning Navigation Satellite System) technology can be used in the target tracking system to obtain position information. Preferably, PPP (Precise Point Positioning, single-point precise positioning) technology can be used, and the acquired position information can reach decimeter-level or even centimeter-level high precision. The invention is based on the GNSS technology and is beneficial to realize precise positioning.
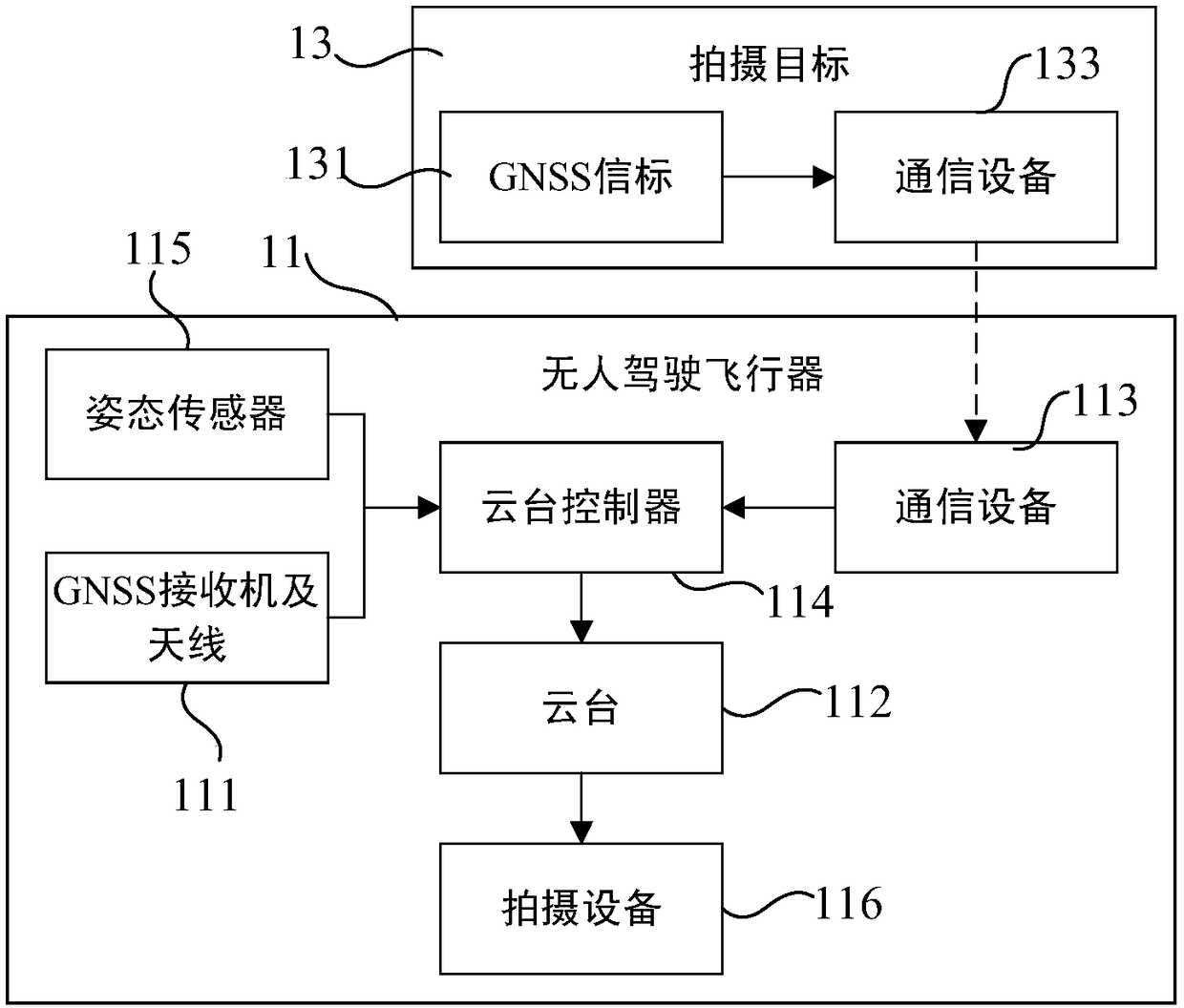
[0087] figure 1 A schematic structural diagram of a target tracking system for an unmanned aerial vehicle according to an embodiment of the present invention is shown. Such as figure 1 As shown, the target tracking system of the unmanned aerial vehicle mainly includes: a pan-tilt controller 114 arranged on the unmanned aerial vehicle 11 (referred to as a UAV) and a positioning device arranged on the object 13 to be photographed. For the specific fun...
Embodiment 2
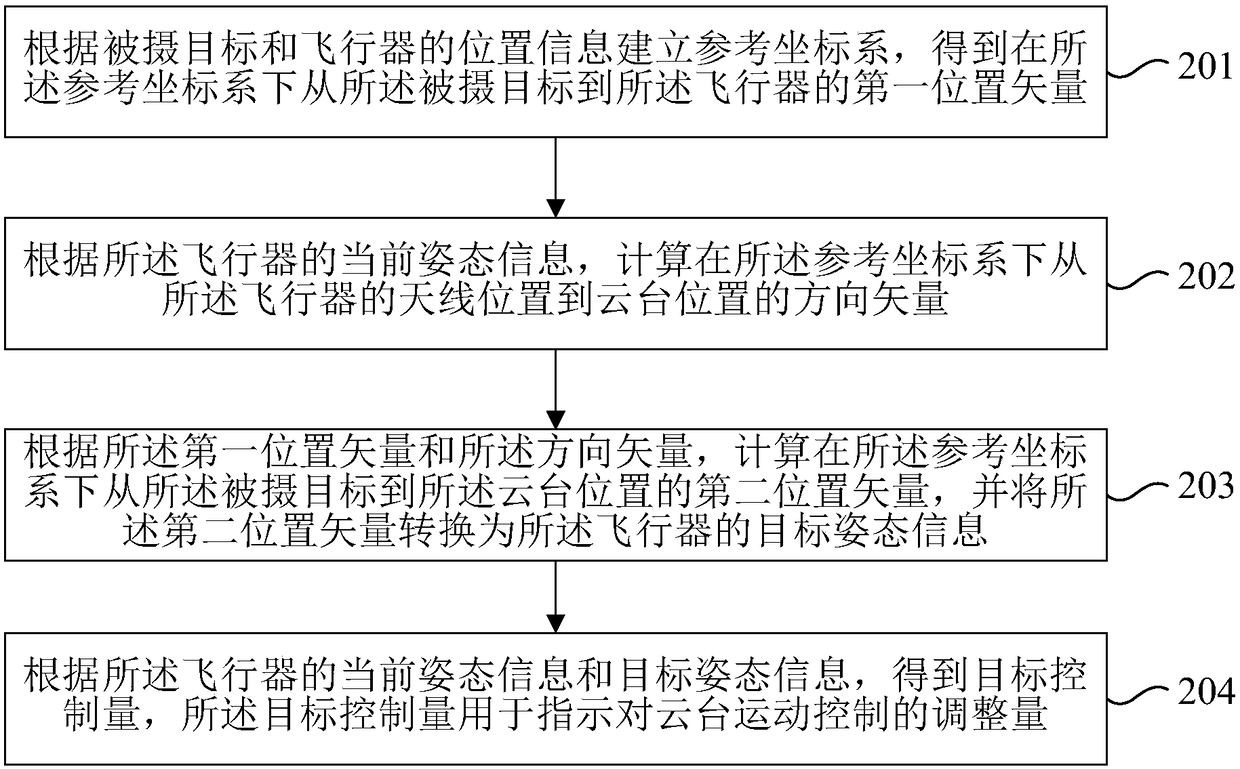
[0096] Figure 2a A schematic flowchart showing a target tracking method according to an embodiment of the present invention. Such as Figure 2a As shown, the target tracking method may specifically include the following steps:
[0097] Step 201, establishing a reference coordinate system according to the position information of the photographed object and the aircraft, and obtaining a first position vector from the photographed object to the aircraft in the reference coordinate system;
[0098] Step 202, according to the current attitude information of the aircraft, calculate the direction vector from the antenna position of the aircraft to the position of the gimbal in the reference coordinate system;
[0099] Step 203, according to the first position vector and the direction vector, calculate a second position vector from the subject to the position of the pan / tilt in the reference coordinate system, and convert the second position vector converted into target attitude i...
Embodiment 3
[0129] image 3 A schematic flowchart showing a target tracking method according to another embodiment of the present invention. like image 3 As shown, in this embodiment, the GNSS technology is used as an example to illustrate the shooting and tracking method. In this embodiment, the same formulas as those in Embodiment 2 have the same meanings, and will not be repeated here. The target tracking method may specifically include the following steps:
[0130] Step 301: GNSS beacons receive GNSS signals for precise positioning, and obtain the position P of the photographed target t (lon t ,lat t ,hei t ) (usually lat t ,lon t in degrees, hei t in meters).
[0131] Step 302: the communication device encodes the position of the photographed target and modulates it onto a 433MHz radio signal for transmission;
[0132] Step 303: The pan / tilt controller receives the position P of the object to be photographed from the communication device t , at the same time obtain the UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com