All-direction automatic fire extinguishing robot
An automatic fire extinguishing and robot technology, applied in the field of fire extinguishing robots, can solve the problems that the robots are not flexible enough, cannot control the fire situation in the first time, and the fire extinguishing is not fast enough, so as to achieve the effect of flexible and rapid fire extinguishing action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
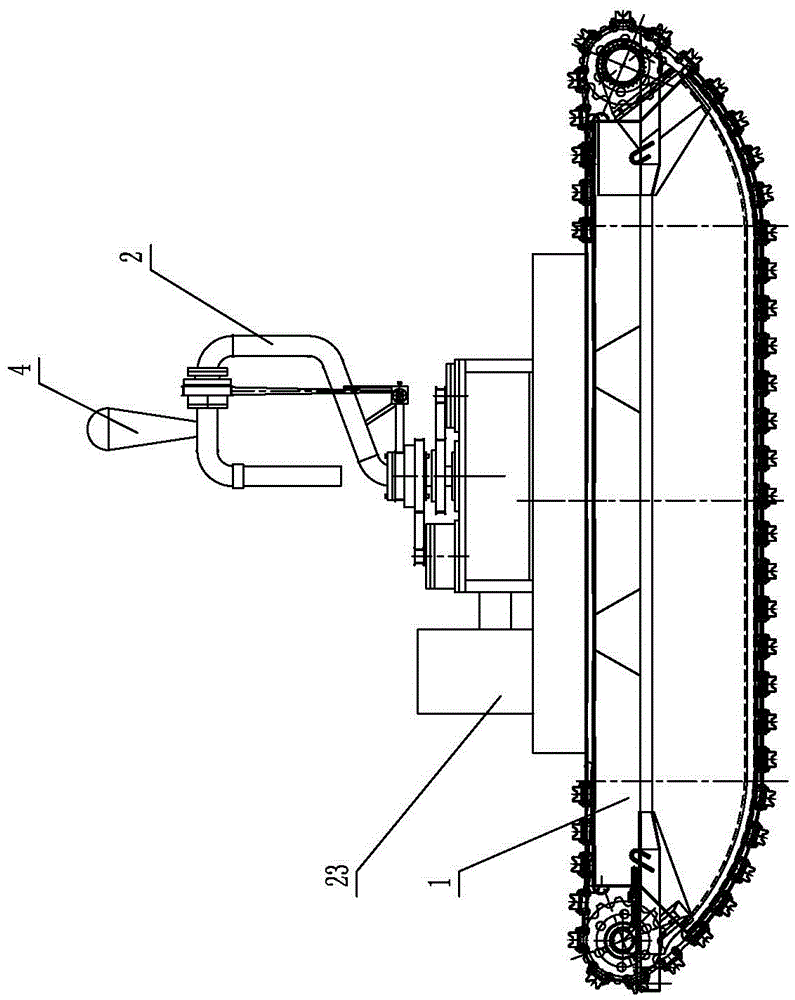
[0027] Such as Figure 1-4 , is a kind of all-round automatic fire extinguishing robot, comprises walking trolley 1, and walking trolley 1 is crawler vehicle, and walking trolley 1 is connected with fire extinguishing agent nozzle 2 in rotation, and fire extinguishing agent nozzle 2 includes the first that is rotatably connected on walking trolley 1 A rotating part 2a, the end of the first rotating part 2a is provided with a transition part 2b integrally connected with it, and the end of the transition part 2b is rotatably connected with a second rotating part 2c; the first rotating part 2a is a vertical pipe section, and the transition Part 2b is a bent pipe section, and the second rotating part 2c is an L-shaped pipe section; the axis of rotation of the first rotating part 2a is perpendicular to the horizontal plane, the axis of rotation of the second rotating part 2c is parallel to the horizontal plane, and the nozzle of the fire extinguishing agent nozzle 2 The axis is per...
Embodiment 2
[0030] Such as Figure 5-7, is a kind of all-round automatic fire extinguishing robot, comprises walking trolley 1, and walking trolley 1 is crawler vehicle, and walking trolley 1 is connected with fire extinguishing agent nozzle 2 in rotation, and fire extinguishing agent nozzle 2 includes the first that is rotatably connected on walking trolley 1 A rotating part 2a, the end of the first rotating part 2a is provided with a transition part 2b connected with it, and the end of the transition part 2b is rotatably connected with the second rotating part 2c; the transition part 2b is a horizontal pipe section, and the first rotating part 2a is a vertical pipe section arranged on the side of the transition part 2b, and the second rotating part 2c is a vertical pipe section; the rotation axis of the first rotation part 2a is perpendicular to the horizontal plane, and the rotation axis of the second rotation part 2c is parallel to the horizontal plane. The nozzle axis of the pipe 2 i...
Embodiment 3
[0032] Such as Figure 8 with 9 , The difference from Embodiment 2 is that the transition part 2b is a horizontal pipe section, the first rotating part 2a is a vertical pipe section, and the second rotating part 2c is an L-shaped pipe section. When the device works, the first worm gear shaft drives the first rotating part 2a to rotate, and the second worm gear shaft drives the second rotating part 2c to rotate. The fire extinguishing agent nozzle 2 can rotate in all directions in the horizontal plane and the vertical plane, and the fire extinguishing agent nozzle 2 selects a suitable angle to spray the fire extinguishing agent to put out the fire source.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com