Automotive active suspension control method with dead-zone executer
A technology of automobile suspension and control method, which is applied in the direction of suspension, elastic suspension, vehicle components, etc., can solve the problems of the actual performance of the system being reduced, and the inability to maintain the comfort controller.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
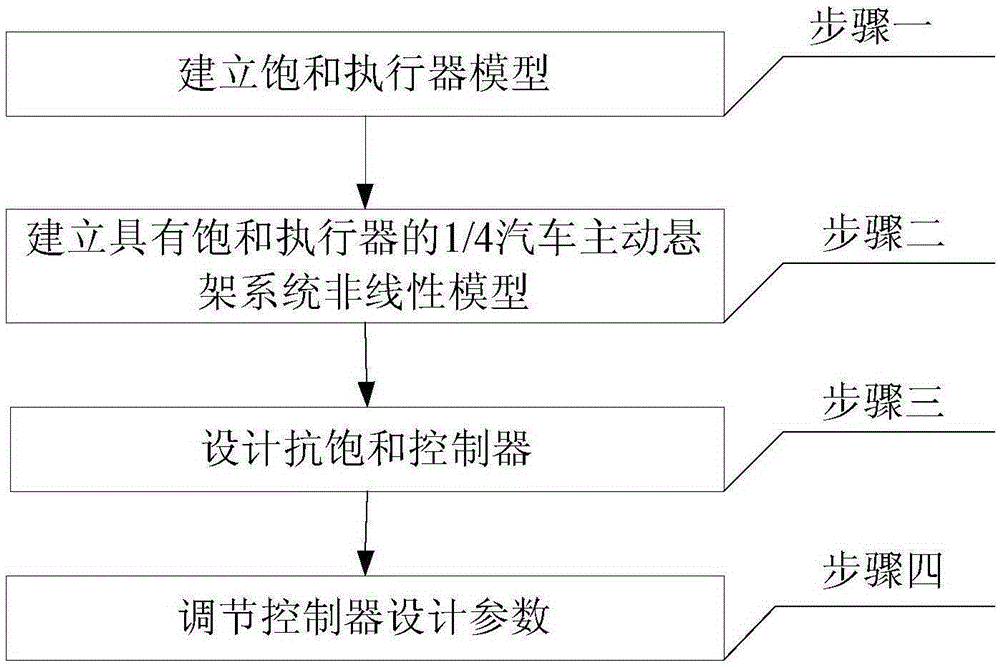
[0055] Specific embodiment one: a kind of active vehicle suspension control method with dead zone actuator in this embodiment is prepared according to the following steps:
[0056] The design of the dead zone compensation controller applies the method of adaptive control in modern control theory, and finally applies the principle of Lyapunov stability to verify;
[0057] Step 1, establishing a mathematical model of the actuator dead zone in the active suspension system;
[0058] (1) The mathematical model of the dead zone of the actuator is as follows:
[0059] u = D Z ( ν ) = g r ( ν ) , i ...
specific Embodiment approach 2
[0096] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: combining figure 2 In the second step, the 1 / 4 vehicle active suspension model with the dead zone characteristic actuator is established as follows:
[0097] According to the characteristics of the 1 / 4 vehicle active suspension system, the 1 / 4 vehicle active suspension model with the dead zone characteristic actuator is established as follows:
[0098] m s z ·· s = - F d ( z · ...
specific Embodiment approach 3
[0102] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that in step three, the dead zone compensation controller is designed using 1 / 4 of the dead zone characteristic actuator. The specific process is as follows:
[0103] (1) Define the state variable x of the system 1 = z s , x 3 =z u and Write the equation of state as:
[0104] x · 1 = x 2 x · 2 = θ 1 D Z ( ν...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com