Self-adaptive hunting device using multiple robot pursuers to hunt single moving target and method
A moving target and multi-robot technology, which is applied in the field of self-adaptive round-up devices where multi-robot hunters round up a single moving target, can solve the problems of increased algorithm complexity, inability to meet simulated reality, unrealistic problems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
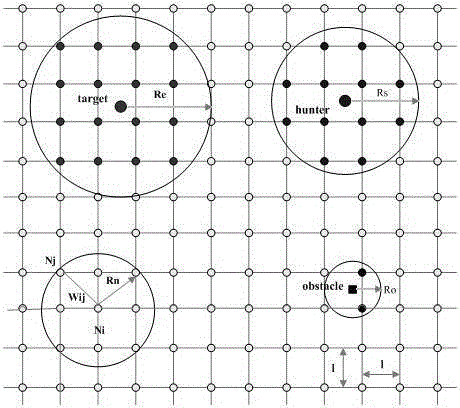
[0052] First, formally describe the round-up task, and set a round-up task as T={N c ,As}, where, N c is the number of hunters needed to round up a moving target, A s Indicates the area of the roundup mission. The initial position of the hunter in the hunting team Ω is random, marked as h i , i=1,2,…,n, the speed is V h , the coordinate position at time t is The moving target is marked as e, the initial position is random, and the speed is V e , the coordinate position at time t is (P e ) t =((x e ) t ,(y e ) t ). Assuming that the hunting team and the moving target are moving at a constant speed in the map, the position of the hunter at time t+1:
[0053] ( P h i ) t + 1 = ( ( x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com