


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A Mechanically Safe Variable Stiffness Elastic Joint
An elastic joint and variable stiffness technology, applied in the field of robotics, can solve the problems of poor variable stiffness characteristics, large energy consumption, and low safety, and achieve the effects of stiffness adjustment, fast response speed, and low reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
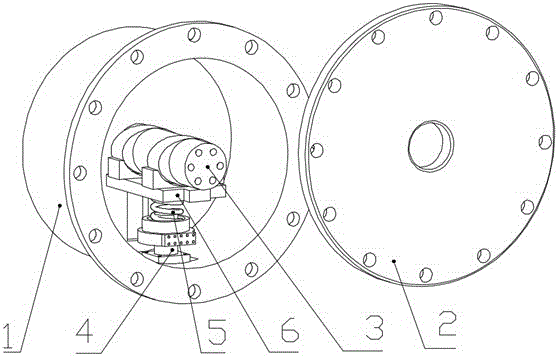
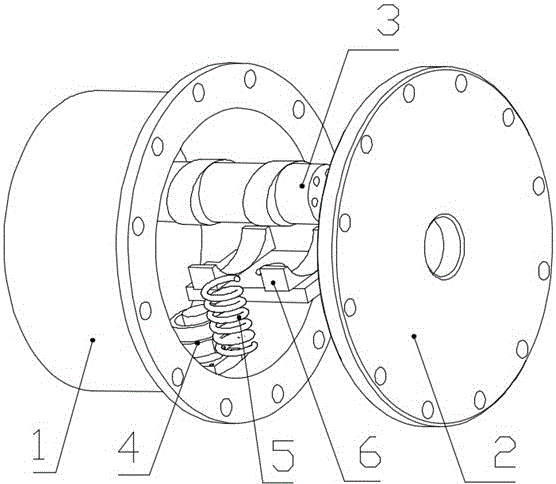
[0045] A mechanical safety variable stiffness elastic joint, specifically comprising: a first joint output shaft 1, a second joint output shaft 3, a linear motor 4, a spring 5, and a push plate 6; it is characterized in that: the first joint output shaft 1 The inner surface is provided with a motor mounting seat, and the linear motor 4 is fixed on the motor mounting seat; the moving part of the linear motor 4 is connected with the spring 5; the other end of the spring 5 is connected with the push plate 6; the second The joint output shaft 3 is a cam shaft, and forms a cam transmission with the push plate 6; the second joint output shaft 3 forms a rotary pair connection with the first joint output shaft 1 .
[0046] A mechanical safety variable stiffness elastic joint of this example. The working principle of realizing the variable stiffness is as follows: the first joint output shaft 1 is connected to the output end of the harmonic or reducer, the second joint output shaft 3 i...
Embodiment 2
[0049] Such as Figure 8 As shown, in the field of bionic robots, the variable stiffness robot elastic joints of this example are installed at the leg joints of the hexapod bionic robot, and the input end 10 of the bionic robot leg is fixedly connected with the first joint output shaft 1 of the elastic joint, and the second The joint output shaft 3 is fixedly connected with the output end 11 of the leg of the bionic robot. In the application process, the stiffness characteristics of the elastic joint are set in advance according to the working condition information. During the walking process of the bionic robot, when the motor drives the input end 10 of the leg of the bionic robot to rotate, the external load will affect the output end 11 of the leg of the bionic robot. When the impact occurs, the elastic joint in this example will produce a buffering effect through the elastic action of the spring 5, so that there is an elastic action between the output shaft 1 of the first ...
Embodiment 3
[0051] Such as Figure 9 As shown, in the medical field, the elastic joint of the variable stiffness robot in this example can be installed at the joint of the human prosthesis leg, and the joint between the thigh and the calf of the human prosthesis is equipped with an elastic joint, and the input end of the human prosthesis leg that drives the calf 12 is fixedly connected to the first joint output shaft 1 of the elastic joint, and the second joint output shaft 3 is fixedly connected to the output end 13 of the human prosthetic leg. During the application process, the stiffness characteristics of the elastic joint are set in advance according to the working condition information. During the prosthetic walking process, when the motor drives the input end 12 of the human prosthetic leg to rotate, the external load will have an impact on the output end 13 of the human prosthetic leg. There is an elastic effect between the first joint output shaft 1 and the second joint output sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com