Parallel type lower limb exoskeleton rehabilitation training device
A technology of rehabilitation training and exoskeleton, which is applied in the field of medical rehabilitation system, can solve the problems of inability to control the expansion and contraction of the cylinder in real time, danger, complex installation and adjustment of the adjustment mechanism, etc., and achieve the effect of powerful lower limb rehabilitation function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
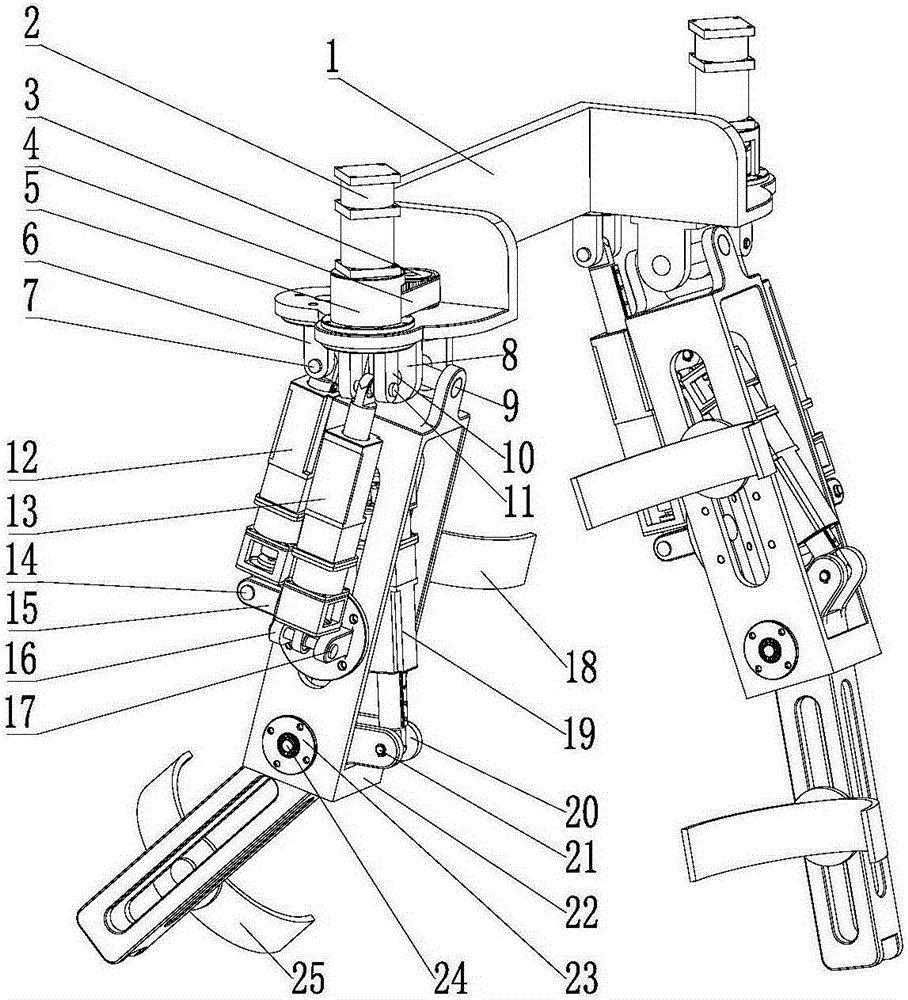
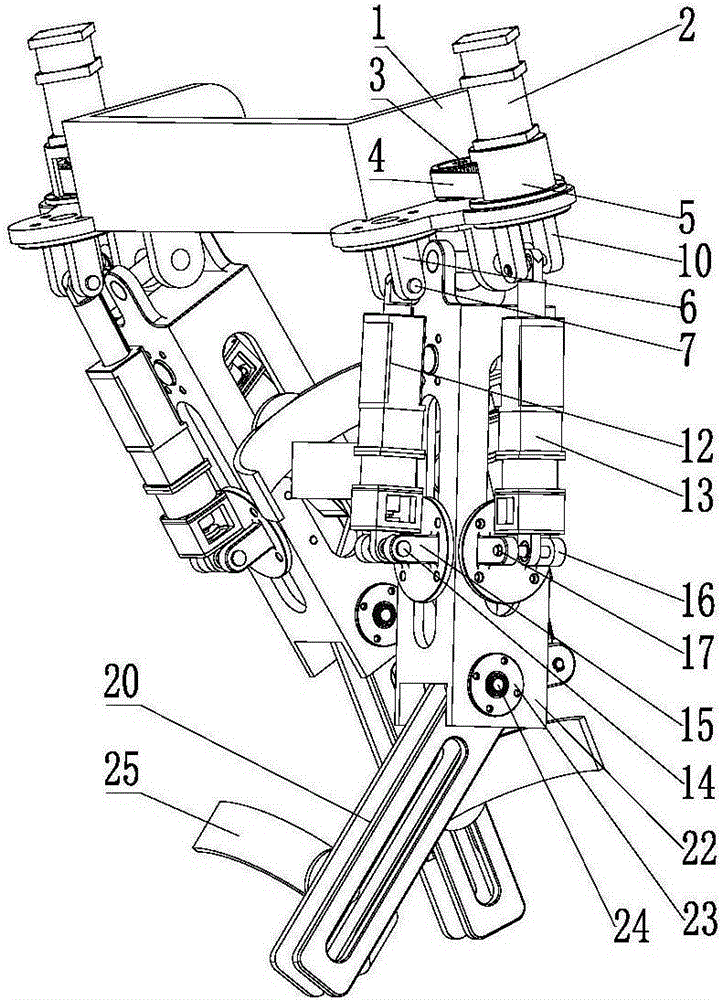
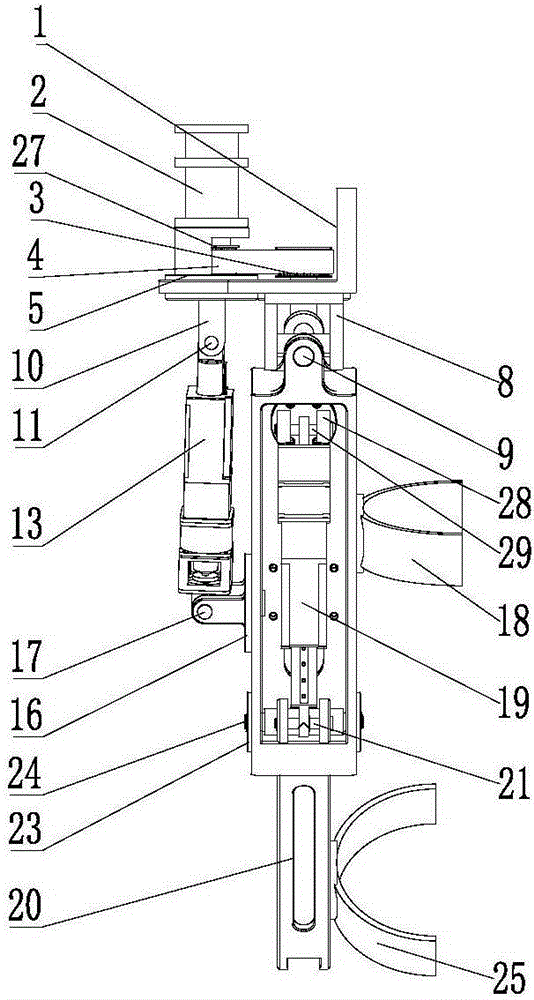
[0020] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
[0021] The purpose of the present invention is to provide a parallel lower extremity exoskeleton rehabilitation training device, which includes a lumbar support frame, a hip joint circumflex unit, a hip joint adduction and abduction unit, a hip joint flexion and extension unit, and a knee joint flexion and extension unit. The hip joint circulatory unit is mainly composed of a shoulder slewing motor, a slewing motor seat, a pulley and a belt, and a Hooke hinge bracket. Driven by the slewing motor, the hip joint can rotate in, out, and rotate the hip joint; The joint adduction and abduction unit is mainly composed of hip joint retraction electric cylinder, spherical bearing, electric cylinder lower end bracket and push rod head bracket, hip joint Hooke hinge, and realize the internal hip joint by controlling the expansion and contraction of the electric...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com