A walking robot with landing buffer function
A walking robot and robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of walking robots without a landing buffer function, and achieve the effect of autonomous attitude adjustment and positioning, protection of safety, and stable walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further introduced below in conjunction with the drawings.
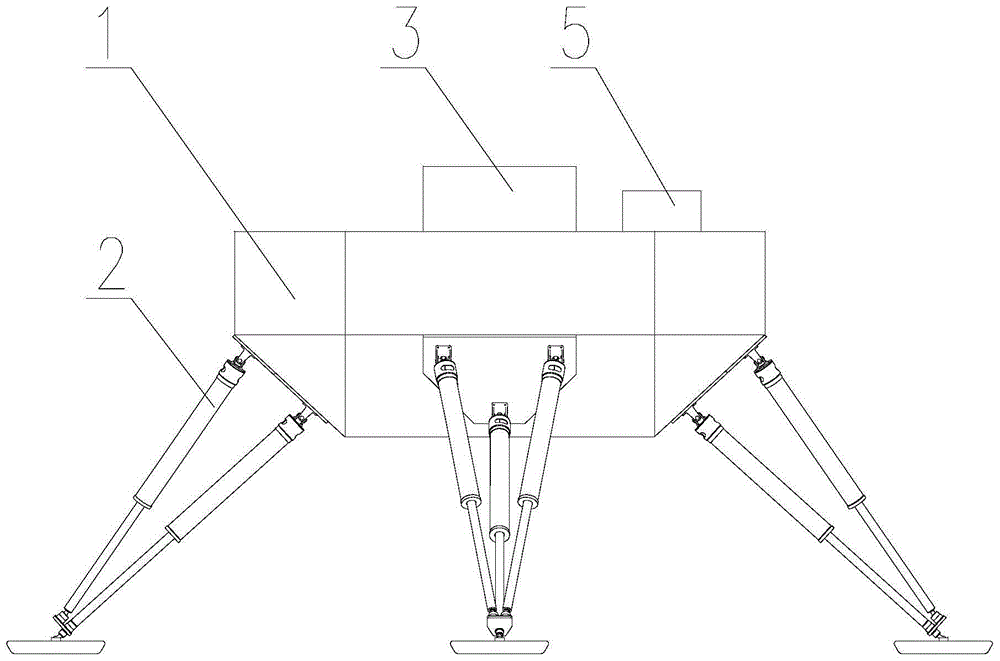
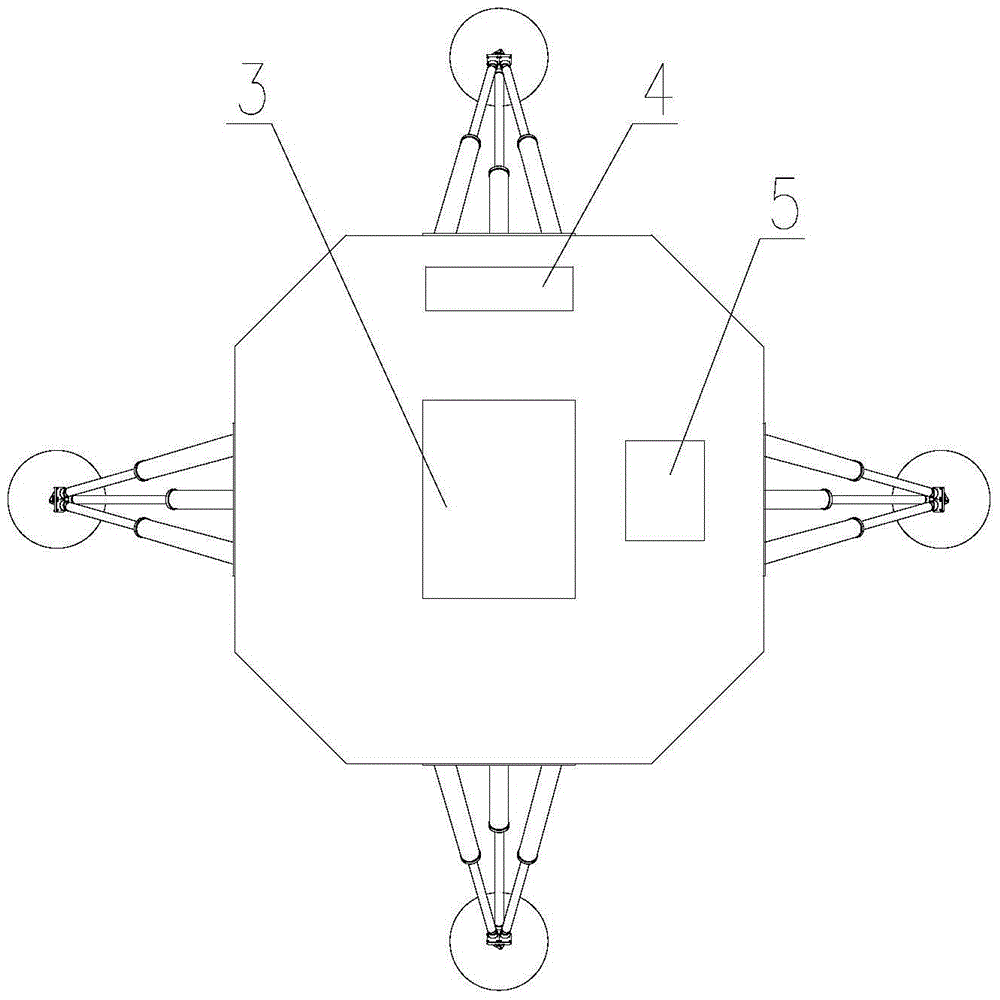
[0031] Such as figure 1 , 2 As shown, a walking robot with a landing buffer function includes a landing platform 1, a plurality of buffer walking mechanisms 2, a parachute bag 3, and a controller 4 arranged around the landing platform 1. The buffer walking mechanism 2 may be, for example, four sets, which are symmetrically arranged on the inclined side under the landing platform 1.
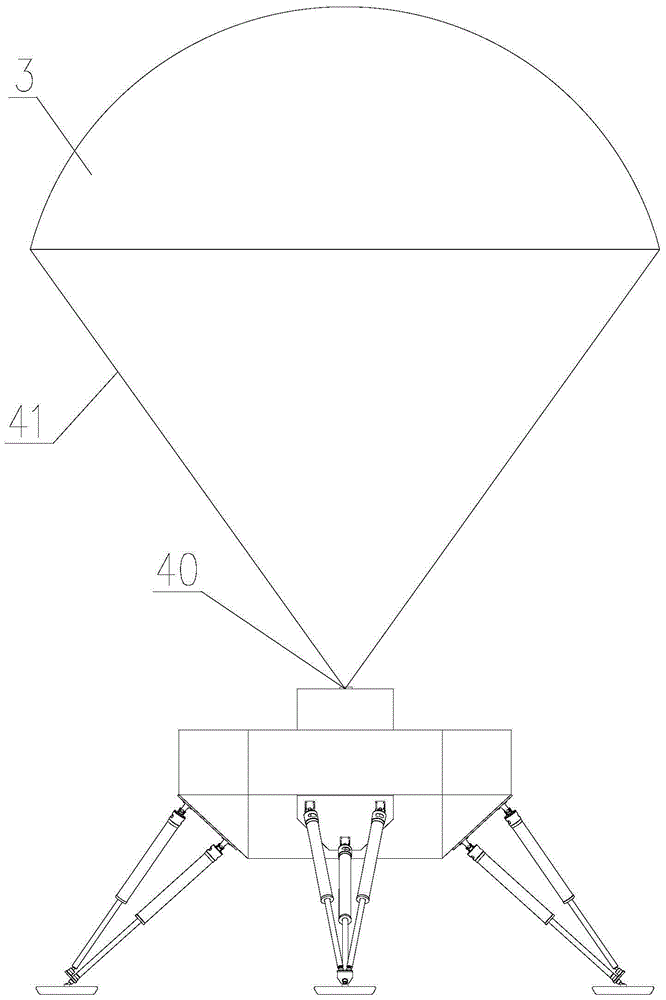
[0032] Such as image 3 As shown, a parachute line cutter 40 is provided on the landing platform 1, and the parachute line 41 is connected to the parachute line cutter 40; the parachute bag 3 is installed on the landing platform 1 through the parachute line 41. When the robot is dropped through the air, the parachute bag 3 is opened before the robot lands to reduce its landing speed. After the robot lands, the parachute rope cutter 40 cuts the parachute rope. For occasions that do not require airdrops, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com