Upper limb rehabilitation robot rehabilitation training motion function assessment method
A rehabilitation robot and robot motion technology, applied in sports accessories, muscle training equipment, instruments, etc., can solve the problems of sensitivity, low accuracy, easy fatigue of patients, high experience and level requirements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
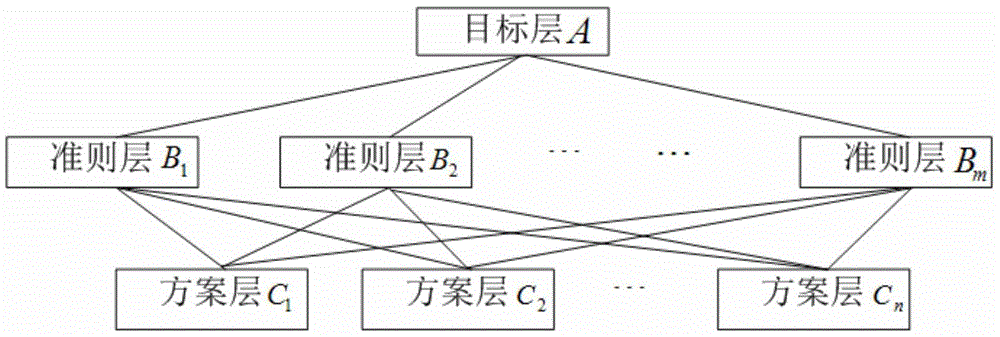
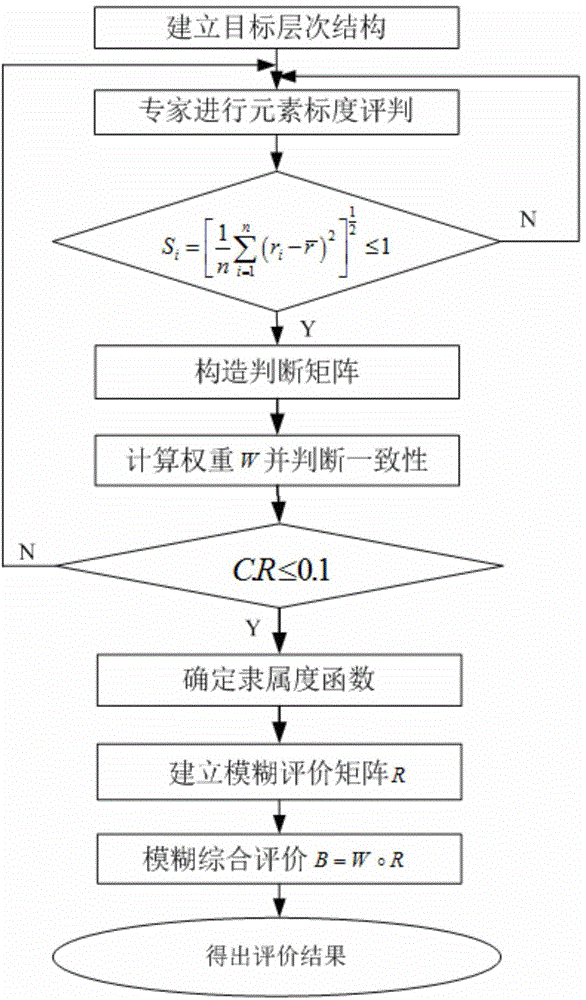
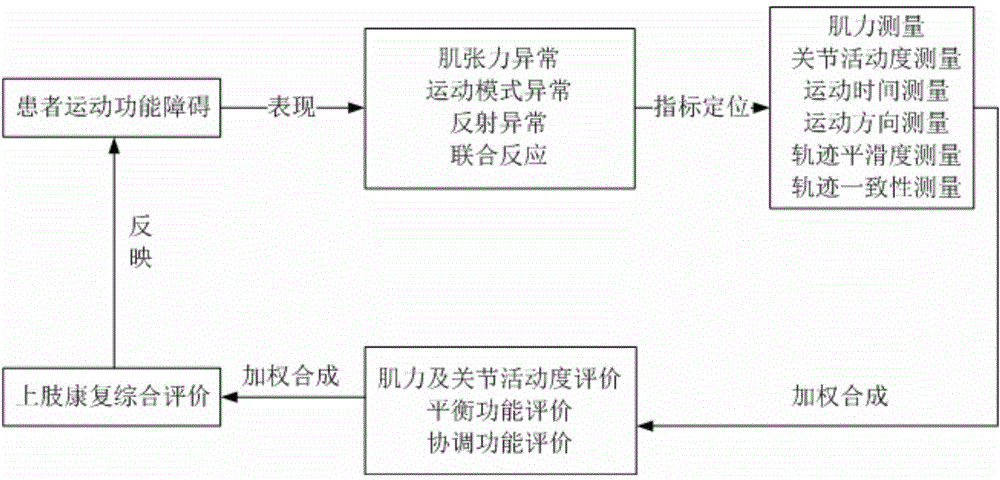
[0129] Embodiment 1 A kind of upper limb rehabilitation robot rehabilitation training motor function evaluation method, it uses self-correcting AHP-fuzzy analysis evaluation method, the clinical motor function evaluation content is transformed into the index system of upper limb rehabilitation robot evaluation, utilizes the data acquisition function of upper limb rehabilitation robot, Quantify the evaluation indicators of the upper limb rehabilitation robot's motor function, and give the evaluation criteria of each evaluation indicator; at the same time, use the self-correcting AHP-fuzzy analysis evaluation method, and on this basis, determine the hierarchical relationship and comments of the upper limb rehabilitation robot evaluation indicators System, establishes the motor function evaluation model of the upper limb rehabilitation robot; evaluates the motor function of the upper limb rehabilitation robot rehabilitation training; among them:
[0130] (1) The specific steps and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com