Vision-based automatic detection method for front vehicle
A technology for automatic detection of vehicles in front, applied in the field of intelligent transportation, can solve problems such as inability to take into account processing speed, detection accuracy, image processing cost, insufficient distinction between vehicles and fake cars, and limited camera installation positions, etc., to save calculations time, overcome the effects of slow processing speed and low detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with accompanying drawing of description, the present invention will be further described.
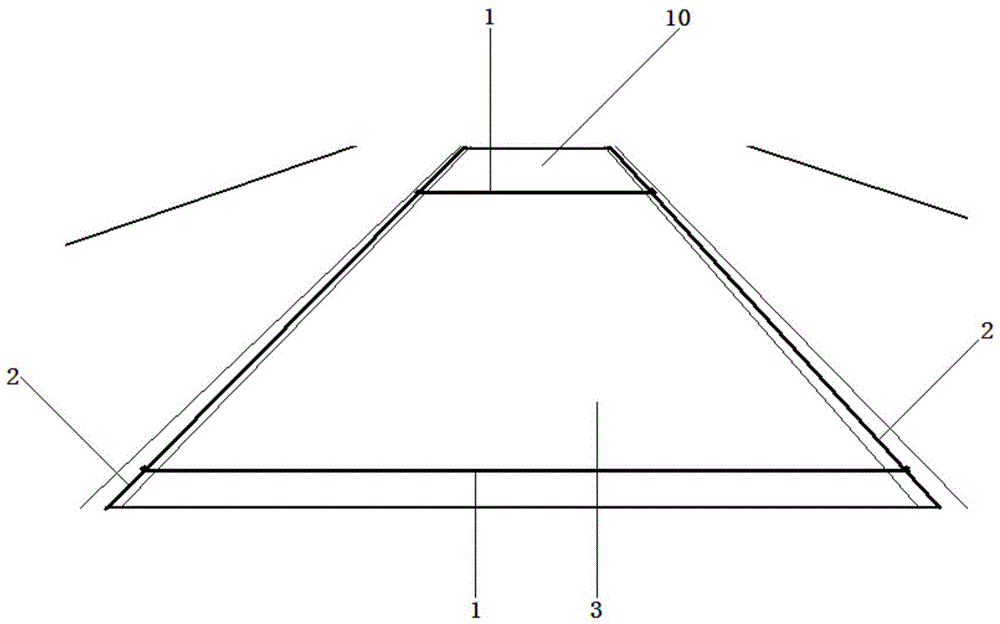
[0031] The continuous image sequence is obtained by the vehicle-mounted camera and transmitted to the computer for processing; before the detection process starts, the calibration operation is performed, such as figure 1 As shown, according to the installation position of the camera, the calibration operation of drawing the calibration line 1 is performed on the image 10 to be detected, and a total of 2 calibration lines are drawn, which are respectively the upper calibration line and the lower calibration line, which are both distributed in the image 10 to be detected, and 2 The starting point and end point of the first marking line are the two sides of the front lane line 2 respectively.
[0032] Manually set the detection area 3 according to the front lane line 2 and the calibration line 1; the detection area 3 is a trapezoidal area composed of the front...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com