Three-degree-of-freedom polar-coordinate hydraulic drive manipulator
A technology of polar coordinates and degrees of freedom, applied in the field of manipulators, can solve the problems of poor versatility and high cost, and achieve the effect of convenient maintenance, low cost and strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
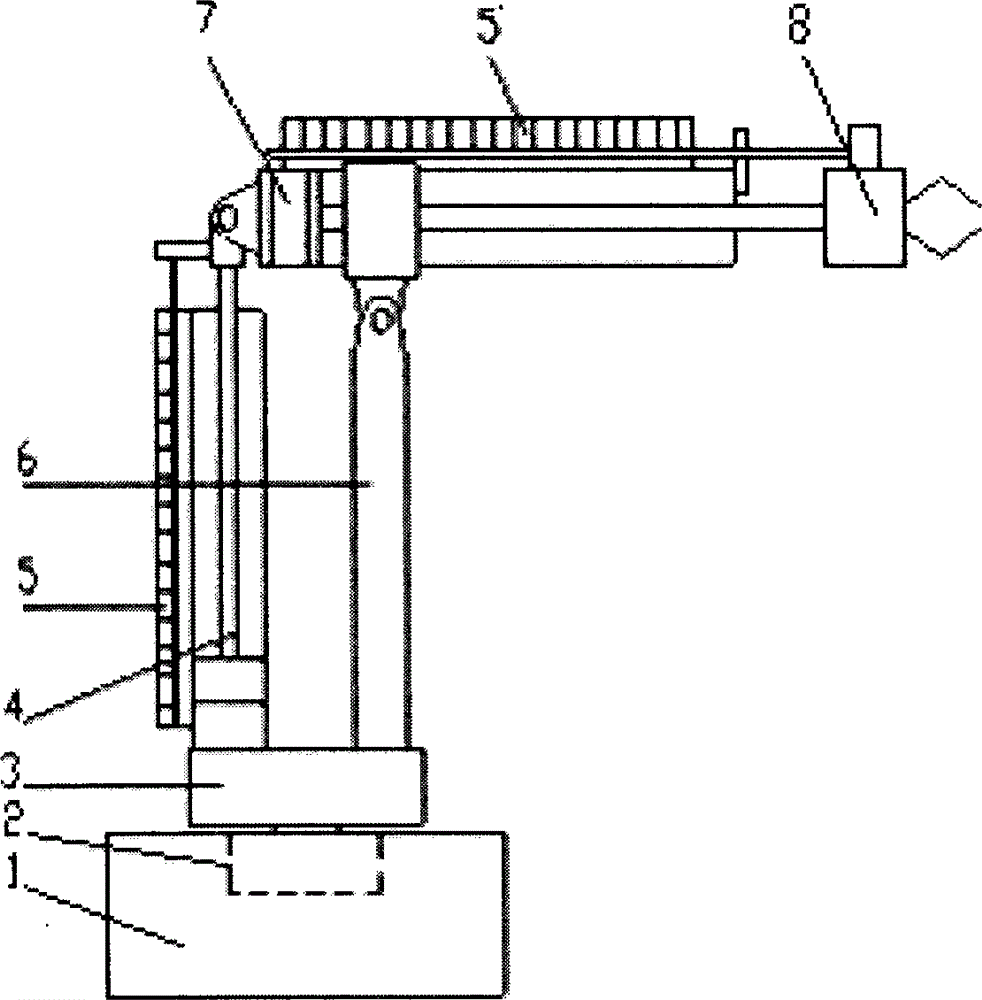
[0007] The technical solution of the present invention will be further described below with reference to the accompanying drawings.
[0008] A three-degree-of-freedom polar coordinate hydraulically driven manipulator, which consists of 1 base, 2 swivel hydraulic cylinders, 3 swivel turntables, 4 pitch hydraulic cylinders, 5 photoelectric detection devices, 6 columns, 7 telescopic hydraulic cylinders, and 8 grippers. The telescopic hydraulic cylinder is connected with the column and the pitching hydraulic cylinder through hinges to form a four-bar linkage mechanism. The claws are installed on the hydraulic cylinder rod of the telescopic hydraulic cylinder. The cylinders are connected, and the photoelectric detection device is composed of an infrared photoelectric sensor and a transmissive grating. An infrared photoelectric sensor is installed on the hydraulic cylinder, and a transmissive grating is fixed on the hydraulic cylinder rod.
[0009] The pitching hydraulic cylinder co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com