A wheel-leg mode switchable robot
A robot and pattern technology, applied in the field of robots, can solve the problems of complex control methods and complex mechanical structures, and achieve the effects of expanding the scope of application, flexible movement, and fast moving speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
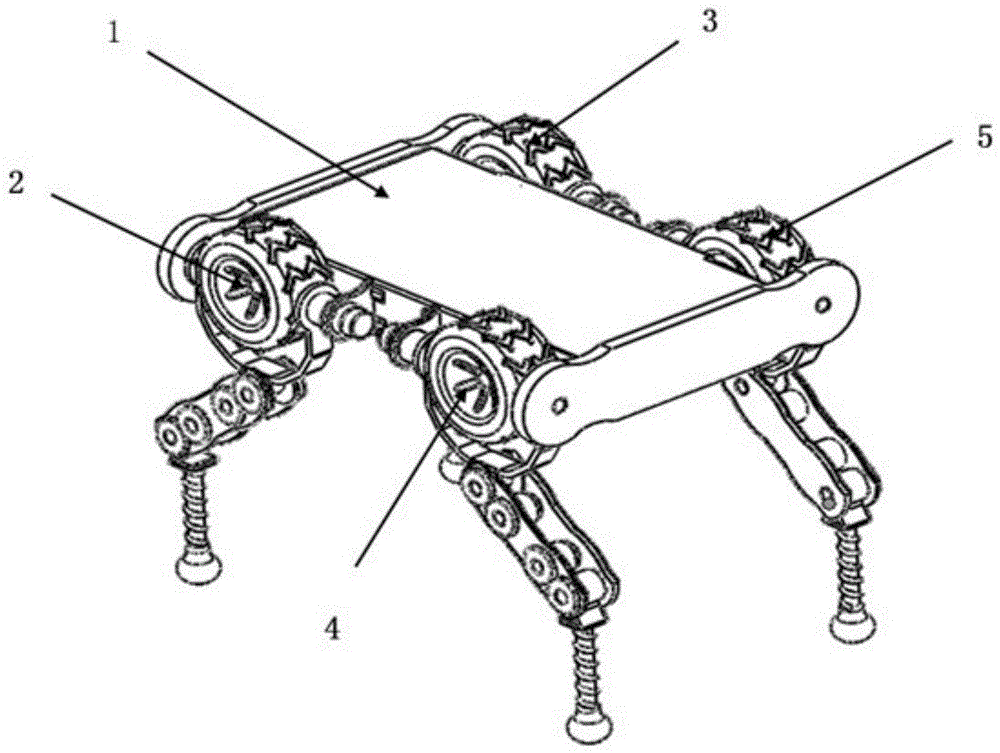
[0023] A wheel-leg mode switchable robot, such as figure 1 and figure 2 Shown, it consists of car body (1), left front wheel (2), right front wheel (3), left rear wheel (4), right rear wheel (5), left front leg (6), right front leg (7), left Composed of hind legs (8) and right hind legs (9). Wherein, the left front wheel (2), the right front wheel (3), the left rear wheel (4) and the right rear wheel (5) have exactly the same structure, and are evenly distributed on the long sides of the robot car body (1) both sides; (6), right front leg (7), left rear leg (8) and right rear leg (9) structure are exactly the same, are evenly distributed on the long side that is installed in robot car body (1).
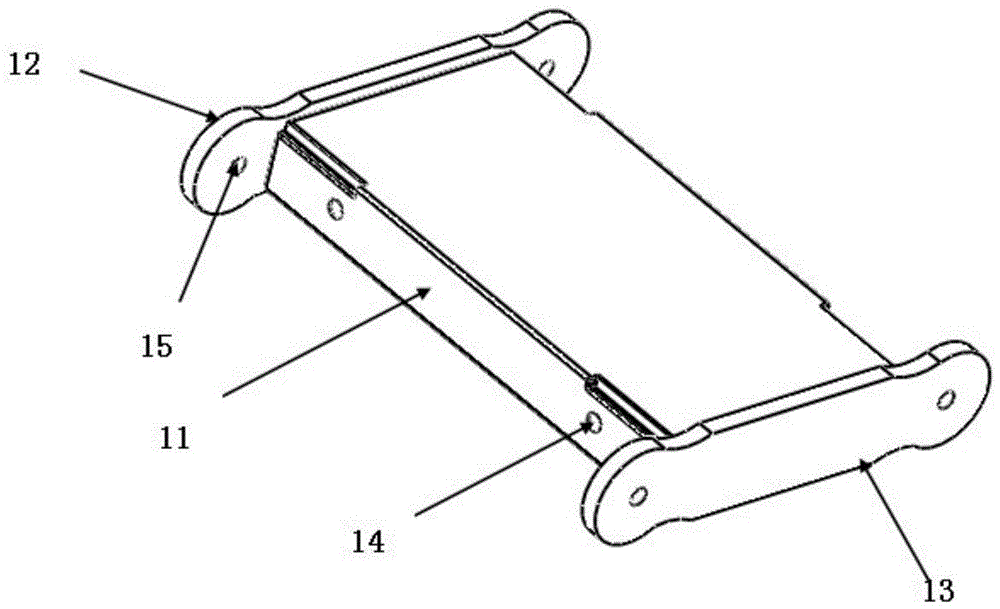
[0024] Such as image 3 As shown, the vehicle body (1) is composed of three parts: a vehicle body (11), a front mounting plate (12) and a rear mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com