Rehabilitation training robot system based on parameter identification and correction
A technology of robot system and rehabilitation robot, applied in the field of rehabilitation training robot system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
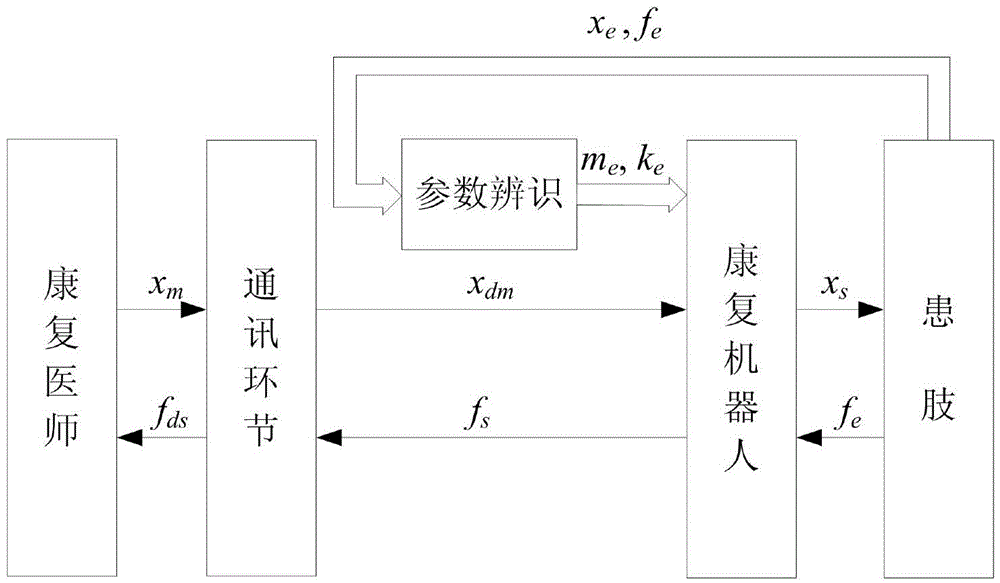
[0030] The interaction between the patient and the rehabilitation physician is an important guarantee for the rehabilitation training robot to complete the rehabilitation training. It can enable the rehabilitation physician to understand the recovery of the patient's muscle tension during training, so as to make further adjustments to the patient's rehabilitation plan. In particular, accurate description of the affected limb is crucial when the rehabilitation physician manipulates the master hand for training. Knowledge of the characteristics of the affected limb can enable the robot controller parameters to be adjusted according to the current working state, thereby improving the effect of rehabilitation training. The premise of good position tracking and motion smoothing performance of the rehabilitation training robot system is that the ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com