Underwater structure detection robot control system and motion control method
An underwater structure and control system technology, applied in the field of robots, can solve problems such as low reliability, no emergency stop button, and inability to realize mobile monitoring robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
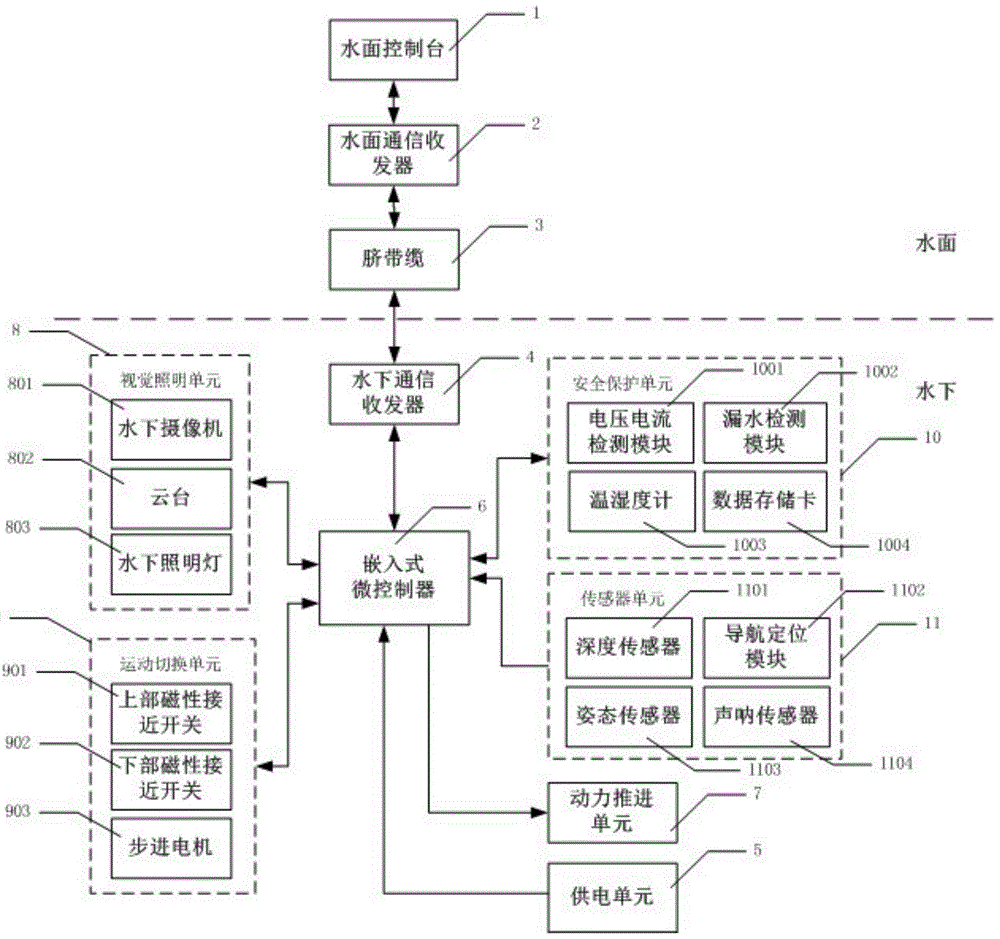
[0081] The underwater structure detection robot control system of the present invention, such as figure 1 As shown, the system includes surface and underwater systems, the surface system is placed on the shore or on the mother ship, and the underwater system is installed on the underwater structure detection robot; the surface system includes a surface console 1, a surface communication transceiver 2 , the umbilical cable 3, they are connected by cables, the surface console 1 sends and receives signals, the surface communication transceiver 2 forwards information from the surface and underwater systems, and the umbilical cable 3 transmits signals and electric energy; the underwater system includes underwater communication Transceiver 4, power supply unit 5, embedded microcontroller 6, power propulsion unit 7, visual lighting unit 8, motion swit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com