Depth image obtaining method for integrated imaging system
A technology that integrates imaging and acquisition methods, applied in stereoscopic systems, image communication, electrical components, etc., can solve problems such as difficulties in obtaining depth maps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
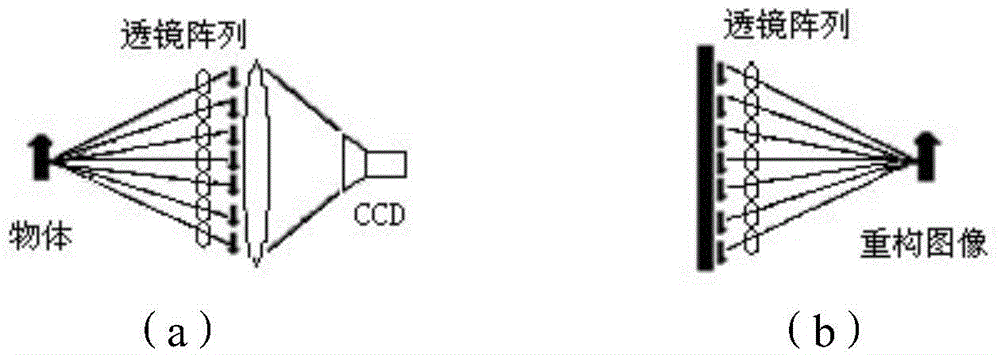
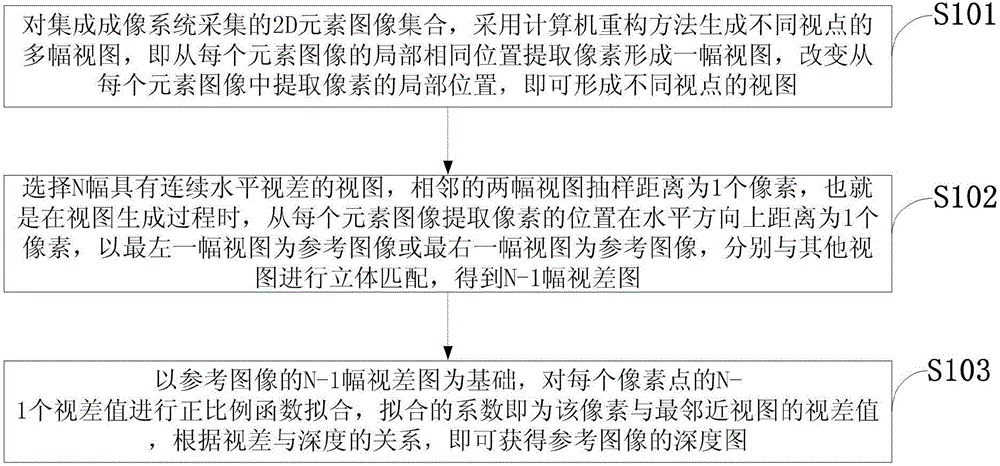
[0094] (1), the collection part of the integrated imaging system in the embodiment of the present invention collects the 2D element image collection of the space scene, the element image is 52 rows*52 columns, and each element image is 40*40 pixels, which is generated by computer reconstruction method Multiple views from different viewpoints, select six views with horizontal parallax for depth map acquisition;
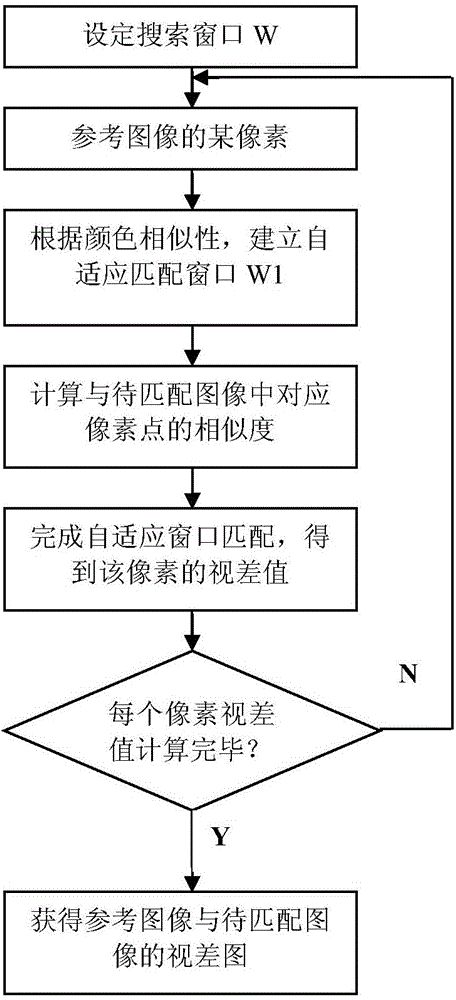
[0095](2), using the leftmost one of the six views as a reference image, perform stereo matching with other views respectively to obtain five disparity maps, the detailed steps are as follows:
[0096] 1. Set the search window size as W=31, and the color similarity judgment threshold as T1=30;
[0097] 2. Establish an adaptive matching window W1 for the pixel (i, j) in the reference image: according to the principle of color similarity, with the pixel as the center, calculate the absolute value of the color difference between each pixel in the search window W and the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com